【中国实用新型】一种应用于行车盲区的主动刹车辅助预警系统
有权-审定授权 中国
- 申请号:
- CN202121806532.6
- 专利权人:
- 贾峰涛
- 授权公告日/公开日:
- 2022.03.04
- 专利有效期:
- 2021.08.04-2031.08.04
- 技术分类:
- B60:一般车辆
- 转化方式:
- 转让
- 价值度指数:
-
- 46.0分
- 价格:
- 面议
发布人
贾峰涛
联系人贾峰涛
-

- 13488432091
-

- 165312473@qq.com


-

- 陕西合阳县王村职业中学
- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN202121806532.6
- 申请日
- 20210804
- 公开/公告号
- CN215944465U
- 公开/公告日
- 20220304
- 申请/专利权人
- [贾峰涛]
- 发明/设计人
- [贾峰涛, 贾天浩, 贾天择, 贾天奕, 贾天潇, 贾锋刚, 高敏]
- 主分类号
- B60R11/04
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 陕西(61)
- 颁证日
- G06T1/00
- 代理人
- [李文义]
摘要
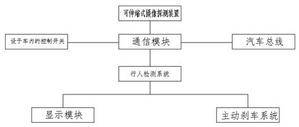
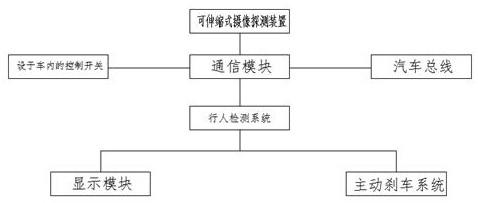
一种应用于行车盲区的主动刹车辅助预警系统,可伸缩式摄像探测装置设于汽车底盘前端内,可伸缩式摄像探测装置通过通信模块连接汽车行人检测系统,汽车行人检测系统连接汽车主动刹车系统及显示模块。汽车行驶中,由设于底盘前端内的可伸缩式摄像探测装置收集左右两侧汽车盲区影像信息,行人检测系统分析计算,将盲区影像信息模拟成虚拟图像,在显示模块呈警示信息来实时提醒驾驶员。同时,行人检测系统将计算出的盲区影像轨迹、距离、速度等实时数据传送至汽车主动刹车系统,当驾驶员对危险情况没有做出有效反应时,由汽车主动刹车系统根据实时数据对汽车发出制动指令,提前控制车辆减速或停止,从而避免事故的发生。
权利要求
权利要求数量(8)
独立权利要求数量(1)
1.一种应用于行车盲区的主动刹车辅助预警系统,包括汽车行人检测系统、汽车主动刹车系统、可伸缩式摄像探测装置及显示模块,其特征在于:可伸缩式摄像探测装置设于汽车底盘前端内,可伸缩式摄像探测装置通过通信模块连接汽车行人检测系统,汽车行人检测系统连接汽车主动刹车系统及显示模块;
所述的可伸缩式摄像探测装置由微型高速电机(4)、齿轮(5)、齿轮条(2)、圆柱(3)、探头支架(1)、两颗高清90度广角摄像头(7)、一颗测距雷达(9)、控制器(8)、清洁装置组成,可伸缩式摄像探测装置的探头支架(1)设于汽车底盘前端内,探头支架(1)内固定微型高速电机(4)和控制器(8),圆柱(3)通过齿轮条(2)与微型高速电机(4)的齿轮(5)连接,两颗90度广角摄像头(7)安装于圆柱(3)下方左右45度处,测距雷达(9)安装于两颗90度广角摄像头(7)之间并与控制器(8)连接,清洁装置的三个喷水口(6)安装于探头支架(1)下方;微型高速电机(4)与控制器(8)连接,控制器(8)由通信模块与车内设置的控制开关连接,控制器(8)由通信模块与汽车总线连接。
2.根据权利要求1所述的一种应用于行车盲区的主动刹车辅助预警系统,其特征在于:所述的广角摄像头(7)分别设有一个毫米波雷达。
3.根据权利要求1所述的一种应用于行车盲区的主动刹车辅助预警系统,其特征在于:所述的显示模块为仪表盘或中控显示屏。
4.根据权利要求1所述的一种应用于行车盲区的主动刹车辅助预警系统,其特征在于:所述的可伸缩式摄像探测装置设于汽车底盘两前轮前端连接线中心与汽车前杠中线之间的底盘内,与底盘离地高度一致。
5.根据权利要求1所述的一种应用于行车盲区的主动刹车辅助预警系统,其特征在于:所述的可伸缩式摄像探测装置工作时圆柱(3)伸出探头支架(1),离地8-10cm。
6.根据权利要求1所述的一种应用于行车盲区的主动刹车辅助预警系统,其特征在于:所述的可伸缩式摄像探测装置工作时由控制器(8)控制微型高速电机(4)正反转,实现圆柱(3)的伸缩避障。
7.根据权利要求1所述的一种应用于行车盲区的主动刹车辅助预警系统,其特征在于:所述的清洁装置由玻璃水箱、三个喷水口(6)、汽车喷水泵、水管、车内设置的控制开关组成,玻璃水箱的水管上设有喷水泵,车内设置的控制开关控制喷水泵,水管末端设有三个喷水口(6),安装于探头支架(1)下方,三个喷水口(6)对向广角摄像头(7)及测距雷达(9)方向。
8.根据权利要求1所述的一种应用于行车盲区的主动刹车辅助预警系统,其特征在于:所述的可伸缩式摄像探测装置工作时从底盘视角来实时收集左右汽车车头车尾盲区和本汽车左右A柱视野盲区影像信息。
说明书
技术领域
本实用新型属于行车预警技术领域,具体涉及一种应用于行车盲区的主动刹车辅助预警系统。
背景技术
随着我国城市建设的不断发展和人民生活水平的飞速提升,汽车也源源不断的进入千家万户。然而汽车在给老百姓的出行带来便利的同时,也给他们的生命安全带来了隐患。交通部门的资料统计显示,近10年来我国每年交通事故死亡人数达6-10万人,受伤25万人左右,平均每天死亡人数200人左右,而其中14岁以下的儿童就占六分之一之多,据世界前列。每一个数字的背后,都是一条鲜活的生命,一个悲痛的家庭。在众多的事故当中,由“鬼探头”和“A柱盲区”引发的事故占了相当大的比例。
“鬼探头”通俗来讲,就是在前方有车辆或障碍物阻挡视线,也就是视野盲区,从车头车尾或障碍物后突然蹿出一辆非机动车或行人,司机避让不及时,而造成车伤人亡的惨剧。因为事发突然,彼此都没有反应与躲避的时间与空间,令人猝不及防,因此被称为“鬼探头”。
“鬼探头”主要发生的几种情况:
1、十字路口左转待转车辆后方盲区突然窜出行人或非机动车。
2、多车道邻侧车道车头车尾盲区处突然窜出行人或非机动车。
3、路侧停放车辆车头车尾盲区处突然窜出行人或非机动车。
4、十字路口对向车辆后方盲区突然窜出行人或非机动车。
5、建筑物转角盲区处突然窜出行人或非机动车。
6、公交车站下车乘客或行人、非机动车辆从公交车头突然窜出。
由于驾驶员的视线被阻挡,这时突然出现行人或非机动车,驾驶员很难发现,即使及时发现也多半来不及反应,汽车也没有足够的刹停距离。这类事故的后果都比较严重,若是发生基本上非死即伤。而且这类事故一旦达成所有条件后,基本上无法避免。
2018年3月19日,美国当地时间星期日晚上十点,一辆Uber 的自动驾驶汽车在亚利桑那州坦佩市的公共道路上与一名行人相撞,该行人在送往医院后不治身亡。这是世界上首起自动驾驶车辆在公共道路上撞击行人并致死的事件。警方同时确认,死者为 49 岁的女性 Elaine Herzberg,也有一定的责任,事件发生时该女性正在人行横道外的地方横穿马路,也就是我们车主朋友熟知的“鬼探头”。
事件发生后,Uber 已经暂停了在坦佩、匹兹堡、旧金山和多伦多等城市进行的自动驾驶汽车测试。
为了预防“鬼探头”事故,今年我国部分城市开始在十字路口实行“阶梯式”停止线,收到了良好的效果。然而“鬼探头”事故发生的地点复杂多样,而“阶梯式”停止线只能在十字路口起到作用,对预防多种多样的“鬼探头”事故有很大局限性。
C-V2X技术是车和车、车和人、车和交通设施的交互,它尽可能拓展驾驶员的视野,让肉眼不能看到的、雷达探测不到危险也能被车主感知到。2018年首次在国内开放道路进行了测试,它对预防“鬼探头”事故有很好的效果。但这项技术目前还在试验当中,普及需要长期的时间过程和高昂的成本,难以在短时间内实现。
目前已知汽车上的“鬼探头”监测和预警系统,并不具备提前预警的功能,仅靠增加电脑算力和增加侦测系统的灵敏度,在形成“鬼探头”的所有条件达成后,尽最短时间来侦测到有碰撞危险的人或物,再传送给主动刹车系统进行减速避让,具有很大的延迟性,对“鬼探头”事故的预防和减少作用微乎其微。
A柱盲区事故大多是在汽车转弯是发生的,此时汽车的A柱正好将行人遮挡住,造成无人的假象。汽车A柱盲区在汽车盲区中只占了25%,却能引发交通事故的30%。也正因为如此,A柱盲区被人认为是汽车上最危险的盲区之一。现代汽车的安全越来越被重视,安全成为检测汽车的一项重要指标。各家车厂考虑到安全,都会选择极其粗壮的A柱来增加安全性,从而导致了驾驶员A柱盲区的出现,A柱盲区视野在实际驾驶过程中,特别是转向过程中,会带来较大的安全隐患。
为解决这个问题,今年6月1日,浙江省汽车工程学会批准发布《乘用车数字透视A柱系统性能要求和试验方法》团体标准,标准从整体到局部对透视A柱相关技术标准进行了系统考量,用透视化A柱来解决汽车A柱盲区的问题。其中,哪吒U汽车去年已经成为全球首款搭载“透明”A柱的量产车,而恒驰1汽车和星途汽车也预计未来搭载“透明”A柱。但“透明”A柱看似美好,实际中却存在不少弊端:1、过高的成本但安全功能单一。2、碰撞时搭载屏幕的A柱内饰板容易断裂,对前排人员有一定的安全危险。3、屏幕内容显示不全。4、A柱显示屏会造成驾驶员注意力分散,有一定的安全隐患。以上几点就是“透明”A柱亟待解决的问题。
综上所述,发生“鬼探头”和A柱盲区事故很大一部分原因是因为司机的视线和汽车主动刹车系统预警雷达扫描范围存在盲区,目前解决“鬼探头”和A柱盲区事故的安全系统也还存在各种各样弊端。
在此背景下,一种既能减少甚至消灭“鬼探头”事故和A柱事故的盲区,又能提前预警事故且能解决目前“鬼探头”和A柱盲区安全系统各种弊端的监测预警系统是目前行车安全所急需的一种必要技术手段。
发明内容
为了克服上述现有技术的不足,本实用新型的目的是提供一种应用于行车盲区的主动刹车辅助预警系统,由可伸缩式摄像探测装置从本汽车底盘视角来实时收集两侧汽车前后盲区和本汽车A柱视野盲区的影像信息,并把采集到的影像信息经通信模块传送到汽车行人检测系统,由汽车行人检测系统根据人腿人脚的基本特征和人腿人脚的运动特征等来识别、计算、模拟图像信息,并根据计算、模拟出的实时影像信息的轨迹、速度、距离等数据控制显示模块警示驾驶员。同时汽车行人检测系统将计算、模拟出的实时影像信息的轨迹、速度、距离等数据传送至汽车主动刹车系统,当驾驶员对危险情况没有做出有效反应时,由汽车主动刹车系统根据实时图像信息数据,对汽车发出制动指令,控制汽车提前刹停和减速,从而避免“鬼探头”和A柱盲区事故的发生。
为了实现上述目的,本实用新型采用的技术方案是:
一种应用于行车盲区的主动刹车辅助预警系统,包括汽车行人检测系统、汽车主动刹车系统、可伸缩式摄像探测装置及显示模块,其特征在于:可伸缩式摄像探测装置设于汽车底盘前端内,可伸缩式摄像探测装置通过通信模块连接汽车行人检测系统,汽车行人检测系统连接汽车主动刹车系统及显示模块。
所述的可伸缩式摄像探测装置由微型高速电机(4)、齿轮(5)、齿轮条(2)、圆柱(3)、探头支架(1)、两颗高清90度广角摄像头(7)、一颗测距雷达(9)、控制器(8)、清洁装置组成,可伸缩式摄像探测装置的探头支架(1)设于汽车底盘前端内;探头支架(1)内固定微型高速电机(4)和控制器(8);圆柱(3)通过齿轮条(2)与微型高速电机(4)的齿轮(5)连接;两颗90度广角摄像头(7)安装于圆柱(3)下方左右45度处;测距雷达(9)安装于两颗90度广角摄像头(7)之间并与控制器(8)连接;清洁装置的三个喷水口(6)安装于探头支架(1)下方;微型高速电机(4)与控制器(8)连接;控制器(8)由通信模块与车内设置的控制开关连接;控制器(8)由通信模块与汽车总线连接。
所述的广角摄像头(7)分别设有一个毫米波雷达。
所述的显示模块为仪表盘或中控显示屏。
所述的可伸缩式摄像探测装置设于汽车底盘两前轮前端连接线中心与汽车前杠中线之间的底盘内,与底盘离地高度一致。
所述的可伸缩式摄像探测装置工作时圆柱(3)伸出探头支架(1),离地8-10cm。
所述的可伸缩式摄像探测装置工作时由控制器(8)控制微型高速电机(4)正反转,实现圆柱(3)的伸缩避障。
所述的清洁装置由玻璃水箱、三个喷水口(6)、汽车喷水泵、水管、车内设置的控制开关组成,玻璃水箱的水管上设有喷水泵,车内设置的控制开关控制喷水泵,水管末端设有三个喷水口(6),安装于探头支架(1)下方,三个喷水口(6)向广角摄像头(7)及测距雷达(9)方向。
所述的可伸缩式摄像探测装置工作时从底盘视角来实时收集左右汽车车头车尾盲区和本汽车左右A柱视野盲区影像信息。
本实用新型的有益效果是
一种汽车主动刹车系统之城市内“鬼探头”盲区、“A柱盲区”辅助预警系统,包括设于汽车底盘前端内的可伸缩式摄像探测装置,汽车行人检测系统,汽车主动刹车系统、通信模块、汽车总线、设于汽车驾驶台的显示模块、设于汽车驾驶台的可伸缩式摄像探测装置的手动控制开关、设于汽车驾驶台的可伸缩式摄像探测装置清洁装置的控制开关。所述的可伸缩式摄像探测装置由通信模块与所述的汽车行人检测系统、汽车主动刹车系统、显示模块连接,所述的设于汽车驾驶台的可伸缩式摄像探测装置的手动控制开关由通信模块与所述的可伸缩式摄像探测装置的控制器(8)连接,所述的汽车总线由通信模块与所述的可伸缩式摄像探测装置的控制器(8)连接。
汽车在城市道路行驶中,由设于汽车底盘前端内的可伸缩式摄像探测装置的圆柱(3)从底盘视角收集左右两侧汽车车头车尾盲区和本汽车A柱盲区的影像信息,经通信模块实时传送至汽车行人检测系统,由汽车行人检测系统根据人腿人脚的基本特征和人腿人脚的运动特征等对收集到的车头车尾盲区和汽车A柱盲区的实时影像信息进行识别、计算、模拟处理,并根据计算、模拟出的实时影像信息的轨迹、速度、距离等数据控制显示模块呈警示信息显示出来警示驾驶员。
同时,汽车行人检测系统将识别、计算、模拟出的行人轨迹、距离、速度等实时数据传送至汽车主动刹车系统,当驾驶员对危险情况没有做出有效反应时,由汽车主动刹车系统根据实时数据对汽车发出制动指令,控制车辆提前减速或停止,从而避免“鬼探头”和“A柱盲区”事故的发生。
当汽车从狭窄且两侧封闭的巷道驶入主路时,可伸缩式摄像探测装置可将探测到的主路来往行人、车辆等信息由显示模块显示出来,并根据来往行人、车辆的轨迹、距离、速度警示驾驶员,当驾驶员对危险情况没有做出有效反应时,汽车主动刹车系统根据实时数据对汽车发出制动指令,控制车辆减速或停止,避免事故的发生。
本实用新型也为未来汽车自动驾驶中遇到的“鬼探头”难题提供了一个重要解决手段,成为汽车自动驾驶中主动安全系统的重要一环。
附图说明
图1为本实用新型的工作原理图;
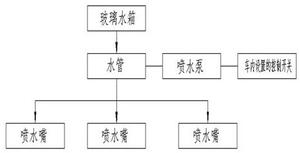
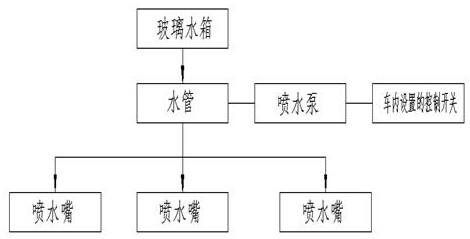
图2为本实用新型清洁装置示意图;
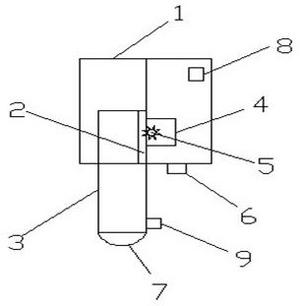
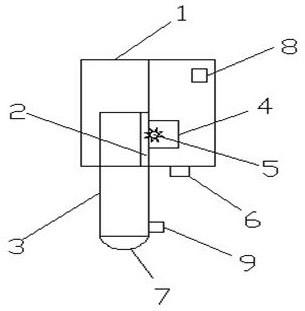
图3为本实用新型可伸缩式摄像装置结构示意图;
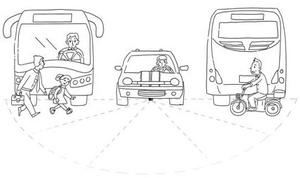
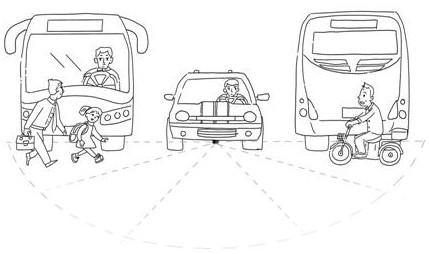
图4为本实用新型可伸缩式摄像装置工作示意图;
其中,(1)为探头支架;(2)为齿轮条;(3)为圆柱;(4)为微型高速电机;(5)为齿轮;(6)为清洁装置的三个喷水口;(7)为广角摄像头;(8)为控制器;(9)为测距雷达。
具体实施方式
以下结合附图对本实用新型进一步叙述。
如图1所示,一种应用于行车盲区的主动刹车辅助预警系统,包括汽车行人检测系统、汽车主动刹车系统、可伸缩式摄像探测装置及显示模块,其特征在于:可伸缩式摄像探测装置设于汽车底盘前端内,可伸缩式摄像探测装置通过通信模块连接汽车行人检测系统,汽车行人检测系统连接汽车主动刹车系统及显示模块。
如图3所示,所述的可伸缩式摄像探测装置由微型高速电机(4)、齿轮(5)、齿轮条(2)、圆柱(3)、探头支架(1)、两颗高清90度广角摄像头(7)、一颗测距雷达(9)、控制器(8)、清洁装置组成,可伸缩式摄像探测装置的探头支架(1)设于汽车底盘前端内;探头支架(1)内固定微型高速电机(4)和控制器(8);圆柱(3)通过齿轮条(2)与微型高速电机(4)的齿轮(5)连接;两颗90度广角摄像头(7)安装于圆柱(3)下方左右45度处;测距雷达(9)安装于两颗90度广角摄像头(7)之间并与控制器(8)连接;清洁装置的三个喷水口(6)安装于探头支架(1)下方;微型高速电机(4)与控制器(8)连接;控制器(8)由通信模块与车内设置的控制开关连接;控制器(8)由通信模块与汽车总线连接。
所述的广角摄像头(7)分别设有一个毫米波雷达。
所述的显示模块为仪表盘或中控显示屏。
所述的可伸缩式摄像探测装置设于汽车底盘两前轮前端连接线中心与汽车前杠中线之间的底盘内,与底盘离地高度一致。
所述的可伸缩式摄像探测装置工作时圆柱(3)伸出探头支架(1),离地8-10cm。
所述的可伸缩式摄像探测装置工作时由控制器(8)控制微型高速电机(4)正反转,实现圆柱(3)的伸缩避障。
如图2所示,所述的清洁装置由玻璃水箱、三个喷水口(6)、汽车喷水泵、水管、车内设置的控制开关组成,玻璃水箱的水管上设有喷水泵,车内设置的控制开关控制喷水泵,水管末端设有三个喷水口(6),安装于探头支架下方(1),三个喷水口(6)对向广角摄像头(7)及测距雷达(9)方向。
所述的可伸缩式摄像探测装置工作时从底盘视角来实时收集左右汽车车头车尾盲区和本汽车左右A柱视野盲区影像信息。
本实用新型的工作原理:
汽车在城市内道路行驶中,由设于汽车底盘前端内的可伸缩式摄像探测装置从底盘视角收集左右两侧汽车车头车尾盲区和本汽车A柱盲区的影像信息,经通信模块实时传送至汽车行人检测系统,由汽车行人检测系统根据人腿人脚的基本特征和人腿人脚的运动特征等对收集到的车头车尾盲区和本汽车A柱盲区的影像信息进行识别、计算、模拟处理,并根据计算、模拟出的实时影像信息的轨迹、速度、距离等数据控制显示模块呈警示信息显示出来警示驾驶员。
同时,汽车行人检测系统将计算、模拟出的行人轨迹、距离、速度等实时数据传送至汽车主动刹车系统,当驾驶员对危险情况没有做出有效反应时,由汽车主动刹车系统根据实时数据对汽车发出制动指令,控制车辆提前减速或停止,从而避免事故的发生。
当汽车启动时,汽车总线将信息由通信模块传送给可伸缩式摄像探测装置上的控制器(8),控制器(8)控制微型高速电机(4)正转,圆柱(3)伸出探头支架(1),广角摄像头(7)、毫米波雷达及测距雷达(9)开始工作。
当汽车行驶中,车速超过每小时70公里,汽车总线将车速信息由通信模块传送给可伸缩式摄像探测装置上的控制器(8),控制器(8)控制微型高速电机(4)反转,圆柱(3)收缩回探头支架(1);当车速低于每小时70公里,汽车总线将车速信息由通信模块传送给可伸缩式摄像探测装置上的控制器(8),控制器(8)控制微型高速电机(4)正转,圆柱(3)伸出探头支架(1),广角摄像头(7)、毫米波雷达及测距雷达(9)开始工作。
当汽车行驶中,测距雷达(9)所测障碍物距离小于可伸缩式摄像探测装置圆柱(3)避障触发阈值阈值,测距雷达(9)将距离信息传送给可伸缩式摄像探测装置上的控制器(8),控制器(8)控制微型高速电机(4)反转,圆柱(3)收缩回探头支架(1)1秒,1秒后控制器(8)控制微型高速电机(4)正转,圆柱(3)伸出探头支架(1),广角摄像头(7)、毫米波雷达及测距雷达(9)继续工作。
当汽车熄火时,汽车总线将信息由通信模块传送给可伸缩式摄像探测装置上的控制器(8),控制器(8)控制微型高速电机(4)反转,圆柱(3)收回探头支架(1),广角摄像头(7)、毫米波雷达及测距雷达(9)停止工作。
当汽车倒车时,汽车总线将信息由通信模块传送给可伸缩式摄像探测装置上的控制器(8),控制器(8)控制微型高速电机(4)反转,圆柱(3)收回探头支架(1),广角摄像头(7)、毫米波雷达及测距雷达(9)停止工作。
当在特殊路段或有必要时,由驾驶员手动操作设于车内的控制开关,控制开关将信号由通信模块传送给可伸缩式摄像探测装置上的控制器(8),由控制器(8)控制微型高速电机(4)正反转,实现圆柱(3)的伸出和收回。
当汽车行驶时,圆柱(3)在10秒内连续超过3次做到伸出和缩回动作,则由可伸缩式摄像探测装置上的控制器(8)控制微型高速电机(4)反转,圆柱(3)收回,广角摄像头(7)、毫米波雷达及测距雷达(9)停止工作。圆柱(3)继续伸出由驾驶员根据路面情况操作设于车内的控制开关控制。
当可伸缩式摄像探测装置上的探头需要清洁时,驾驶员操作设于车内的控制开关,由所述喷水泵将玻璃水由玻璃水箱经水管输送至所述三个喷水嘴(6),将玻璃水分成细小的射流喷向探头,达到清洁探头的作用。
可伸缩式摄像探测装置的圆柱(3)避障论证:
汽车分短悬和长悬两种。其中长悬汽车底盘两前轮最前端连接线中心与汽车前杠中线之间距离约为55cm左右;短悬汽车底盘两前轮最前端连接线中心与汽车前杠中线之间距离约为30cm左右。
城市内汽车最高速度为每小时70公里,则汽车每秒跑:
70公里/60分钟/60秒=0.01945公里=19.45米
汽车城市内最高速度每秒19.45米
为解决路面上各种障碍物造成圆柱(3)不断伸缩而影响可伸缩式摄像探测装置正常工作,以下给出两种方案。
方案一:将圆柱收回避障触发阈值阈值设为固定阈值阈值。
将短悬汽车前杠中线之间到可伸缩式摄像探测装置最小距离30cm作为圆柱(3)收回避障触发阈值阈值;
汽车以城市内最高限速70公里行进时,在触发阈值阈值30cm内障碍物碰到圆柱(3)的时间为:
0.3米/19.45米=0.01542416秒。
圆柱(3)收回避障的时间:
一般汽车底盘最高离地约10cm-25cm,
以最高离地25cm计算,10cm为所述可伸缩式摄像探测装置安装离地高度,则圆柱(3)最大伸缩行程为:
25cm-10cm=15cm=0.15m
所述可伸缩式摄像探测装置上的齿轮直径为2cm,则齿轮周长:
2*3.14=6.28cm;
微型高速电机(4)转速为每分钟20000转,则每秒转速:
20000/60=333.33圈
333.33*6.28=2093.33cm=20.9333m
则圆柱(3)缩回避障15cm最大行程用时为:
0.15m/20.9333m=0.00716562秒
由上可得:
障碍物碰到圆柱(3)的时间为:
0.3m/19.45m=0.01542416秒
圆柱(3)缩回避障15cm最大行程用时为:
0.15m/20.9333m=0.00716562秒
0.01542416秒大于 0.00716562秒
则:
圆柱(3)缩回避障的时间比障碍物碰到圆柱(3)的时间短;
则:
以城市内汽车最大限度每小时70公里的速度;
以短悬汽车底盘两前轮最前端连接线中心与汽车前杠中线之间距离30cm为圆柱(3)收回避障触发阈值阈值;
以圆柱(3)在最大伸缩行程15cm缩回避障;
在以上极限工况下,所述可伸缩式摄像探测装置上的圆柱(3)完全可以避免障碍碰撞。
方案二:将圆柱收回避障触发阈值阈值设为动态数据。
汽车启动中,速度为0,圆柱(3)收回避障触发阈值阈值为30cm;
汽车速度每小时1-10公里,圆柱(3)收回避障触发阈值阈值为100cm;
汽车速度每小时不超过11-20公里,圆柱(3)收回避障触发阈值阈值为200cm;
汽车速度每小时不超过21-30公里,圆柱(3)收回避障触发阈值阈值为300cm;
汽车速度每小时不超过31-40公里,圆柱(3)收回避障触发阈值阈值为400cm;
汽车速度每小时不超过41-50公里,圆柱(3)收回避障触发阈值阈值为500cm;
汽车速度每小时51-70公里,圆柱(3)收回避障触发阈值阈值为600cm。
汽车在行驶中,车与车时刻保持着最小安全距离,速度越大,距离越远。依照此原则,根据汽车行驶速度将圆柱(3)收回避障触发阈值阈值设为动态数据。这样在各种工况下,圆柱(3)收回避障触发阈值阈值比方案一提高了20倍之多,不光解决了路面上各种障碍物造成圆柱(3)不断伸缩而影响可伸缩式摄像探测装置正常工作问题,而且也为活塞摩擦阻力、信号传输延迟、设备老化等因素预留了更大的缓冲空间。
清洁装置
一种用于汽车盲区监测的可伸缩式摄像探测装置上的探头清洁装置。
由汽车玻璃水箱、水管、喷水泵、三个喷水口(6)、设于车内的控制开关组成。
所述设于探头支架(1)上的三个喷水口(6)由水管与玻璃水箱和喷水泵连接,所述喷水泵与车内控制开关连接。
当需要清洁所述可伸缩式摄像探测装置上的广角摄像头(7)、毫米波雷达及测距雷达(9)时,驾驶员操作设于车内的控制开关,由所述喷水泵将玻璃水由玻璃水箱经水管输送至三个喷水口(6),将玻璃水分成细小的射流喷向探头,达到清洁探头的作用。
价值度评估
技术价值
经济价值
法律价值
0 0 046.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:46.0分
该专利价值较低 (仅供参考)
本专利文献中包含 【1 个实施例】、 【6 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间3 年】专利权的维持时间越长,其价值对于权利人而言越高。
技术价值 30.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
7 个月独立权利要求数量
1 个从属权利要求数量
7 个说明书页数
7 页实施例个数
1 个发明人数量
7 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
6 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 6.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
个人许可备案
0 次权利质押
0 次权利转移
0 个海关备案
否法律价值 10.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
3法律状态
有权-审定授权







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...