






【中国发明,中国发明授权】一种基于衰减记忆滤波的电液伺服控制方法及2-DOF机械臂
无权-未缴年费 中国
- 申请号:
- CN201610012064.2
- 专利权人:
- 电子科技大学
- 授权公告日/公开日:
- 2017.12.15
- 专利有效期:
- 2016.01.11-2036.01.11
- 技术分类:
- B25:手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手
- 转化方式:
- 转让
- 价值度指数:
-
- 54.0分
- 价格:
- 面议
发布人
知识产权运营中心
联系人IP先生
-

- 15113831943
-

- 9411117419@qq.com
-

- 941117419
-

- szhf1188(加微信)
-

- 深圳市南山区粤海街道100号
- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201610012064.2
- 申请日
- 20160111
- 公开/公告号
- CN105538310A
- 公开/公告日
- 20160504
- 申请/专利权人
- [电子科技大学]
- 发明/设计人
- [郭庆, 蒋丹, 张弈, 严尧, 尹静敏, 孙萍]
- 主分类号
- B25J9/16
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 四川(51)
- 颁证日
- G06T1/00
- 代理人
- [张杨]
摘要
本发明公开了一种基于衰减记忆滤波的电液伺服控制方法及2-DOF机械臂,采用参数自适应反步控制方法来提高存在参数不确定性和外负载干扰条件下电液伺服控制驱动2-DOF机械臂的动态控制性能。电液伺服系统中的模型不确定参数采用参数自适应估计律进行估计,然后设计反步控制律实现机械臂的位置跟踪。为了避免反步控制律中的虚拟控制量产生的微分爆炸效果,本发明提出的控制律采用了基于衰减记忆滤波器的方法对虚拟控制量和外负载干扰进行滤波处理,从一定程度上降低了控制饱和的风险,并提高了2-DOF机械臂关节运动的动态控制性能。
法律状态
| 法律状态公告日 | 20211224 |
| 法律状态 | 专利权的终止 |
| 法律状态信息 | 未缴年费专利权终止 IPC(主分类):B25J 9/16 专利号:ZL2016100120642 申请日:20160111 授权公告日:20171215 终止日期:20210111 |
| 法律状态公告日 | 20171215 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
| 法律状态公告日 | 20160601 |
| 法律状态 | 实质审查的生效 |
| 法律状态信息 | 实质审查的生效 IPC(主分类):B25J 9/16 申请日:20160111 |
| 法律状态公告日 | 20160504 |
| 法律状态 | 公开 |
| 法律状态信息 | 公开 |
权利要求
权利要求数量(9)
独立权利要求数量(2)
1.一种基于衰减记忆滤波和参数自适应的电液伺服控制方法,该方法包括:
步骤1:建立电液伺服执行器模型;
步骤2:驱动电液伺服,实时获取电液伺服的反馈数据;
步骤3:利用反馈数据结合系统的状态误差计算控制变量;
步骤4:采用衰减记忆滤波器对控制变量进行滤波;
步骤5:结合反馈数据、系统误差和滤波后的控制变量计算参数自适应估计律;
步骤6:结合参数自适应估计律和滤波后控制变量计算修正反步控制律;
步骤7:根据修正反步控制律对电液伺服实时进行驱动。
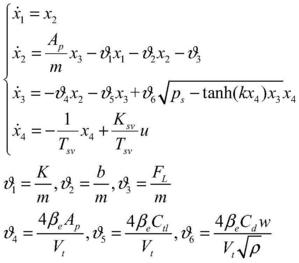
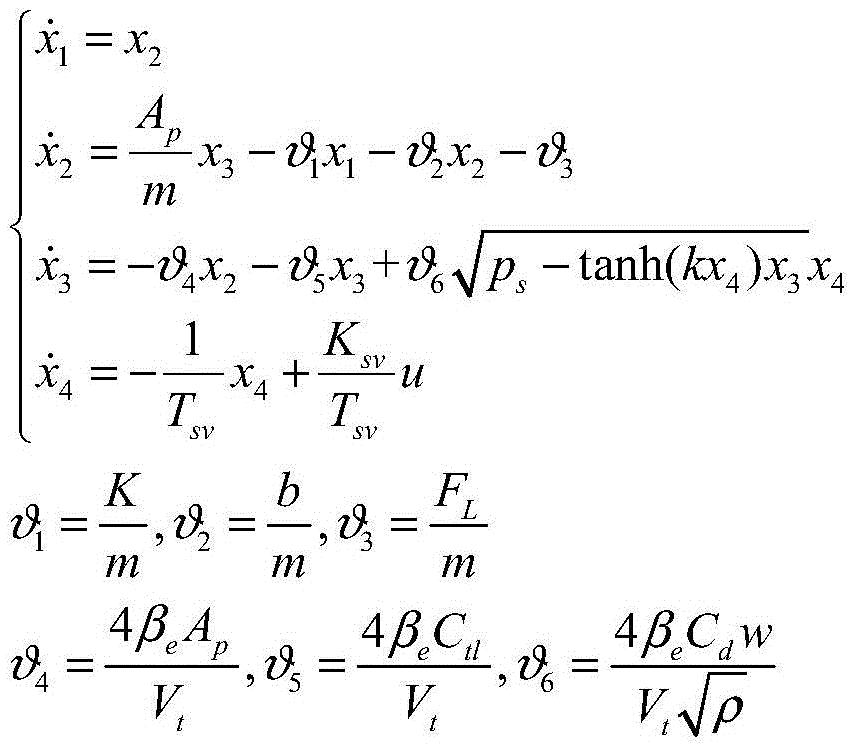
2.如权利要求1所述的一种基于衰减记忆滤波和参数自适应的电液伺服控制方法,其特 征在于所述步骤1中建立的伺服执行器模型为:
其中x i(i=1,…,4)为模型状态变量, y液压缸输出位移, 为 输出位移变化率,p L为负载压力,x v为伺服阀阀芯位移,θ i(i=1,…,6)为不确定参数,m为负载 质量,p s为供油压力,A p为对称缸横截面积,C tl为液压缸总泄漏系数,V t为液压缸容积,β e 为液压油有效体积弹性模量,C d为伺服阀流量系数,w为伺服阀面积梯度,ρ为液压油密度, K为负载刚度系数,b为液压油阻尼系数,F L为外负载压力,K sv为伺服阀放大系数,T sv为伺 服阀一阶响应时间常数,k为反正切函数tanh(·)中指数项系数,u为伺服阀控制电压。
4.如权利要求2所述的一种基于衰减记忆滤波和参数自适应的电液伺服控制方法,其特 征在于所述步骤3中系统误差z i(i=1,…,4)表示为
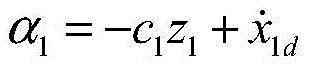
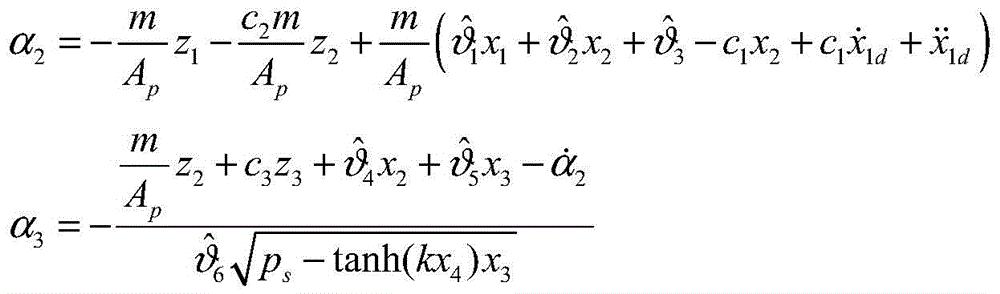
其中x 1d表示液压缸期望位移指令,α i(i=1,2,3)为反步控制律设计中虚拟控制变量,表示为:
其中c 1c 2c 3表示反步控制律中的控制参数。
6.如权利要求4所述的一种基于衰减记忆滤波和参数自适应的电液伺服控制方法,其特 征在于所述步骤5中自适应律为:
其中 为经过衰减记忆滤波器之后得到虚拟控制量的变化律估计值,k i(i=1、2、3、4、5、6)表 示参数自适应估计律中的放大系数。
7.如权利要求6所述的一种基于衰减记忆滤波和参数自适应的电液伺服控制方法,其特 征在于所述步骤6中修正反步控制律为:
其中 为滤波器误差的有界约束值。
3.如权利要求1所述的一种基于衰减记忆滤波和参数自适应的电液伺服控制方法,其特 征在于步骤2中获取的反馈数据包括:液压缸输出位移、液压缸输出位移变化率、液压缸负载 压力、伺服阀阀芯位移、液压缸外负载压力。
8.如权利要求3所述的一种基于衰减记忆滤波和参数自适应的电液伺服控制方法,其特 征在于采用拉格朗日方法建立液压缸外负载力模型。
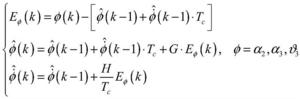
5.如权利要求1所述的一种基于衰减记忆滤波和参数自适应的电液伺服控制方法,其特 征在于所述步骤4中采用衰减记忆滤波器对虚拟控制变量和液压缸外负载压力进行滤波;
其中φ(k)为第k步计算值, 为第k-1步估计值, 为第k-1步变化率的估计值, 为k步估计值, 为第k步变化率的估计值,T c表示控制步长,滤波参数G=1-λ 2, H=(1-λ) 2,滤波参数0<λ<1。
9.一种采用基于衰减记忆滤波的电液伺服控制方法的2-DOF机械臂,该机械臂包括:3 个机械连杆,包括:第一连杆、第二连杆、第三连杆,2个电液伺服阀,2个双作用液压缸,1 个伺服电机,1个定量柱塞泵,1个油箱;其中第一连杆与第二连杆之间铰接,称该处为肩关 节,第二连杆与第三连杆铰接,称该处为肘关节;肩关节与肘关节处分别设置一个电液伺服阀 与双作用液压缸;整个机械臂设置1个伺服电机、1个定量柱塞泵和1个油箱;第二连杆与第 三连杆上分别设置一光电编码器,用于测量两个关节的运动角度和角速度;在两个液压缸进油 口和出油口各设置1个压力传感器,测量液压缸的负载力,在定量柱塞泵出口安装1个压力表, 监测系统的供油压力。
说明书
技术领域
本发明涉及电液伺服的控制方法,特别是电液伺服的修正反步控制方法。
背景技术
目前应用在电液伺服控制系统中的先进控制方法有很多种,包括鲁棒控制、参数自适应控制,反步控制,精确反馈线性化方法等。传统的参数自适应控制方法只能估计未知的不确定参数常量,不能估计时变参数如系统的外界干扰等。电液伺服控制系统由于是严格反馈模型,经常采用反步控制方法设计控制律,但是控制律中需要对虚拟控制变量进行求导,直接求导会带来微分爆炸,因此,本专利采用衰减记忆滤波器与参数自适应估计律相结合的方法,不仅可以对液压6个不确定参数进行估计,同时也可以对时变的外负载干扰进行滤波,而且对反步控制律中的虚拟控制量进行滤波处理,避免微分爆炸,防止电液伺服执行器的控制饱和的产生。电液伺服执行器将驱动2自由度机械臂的运动。
发明内容
附图说明
图1为本发明的采用基于衰减记忆滤波的电液伺服控制方法的2-DOF机械臂;
图2为本发明虚拟变量计算顺序示意图;
图3为本发明一种基于衰减记忆滤波的电液伺服控制方法流程图。
具体实施方式
价值度评估
技术价值
经济价值
法律价值
0 0 054.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:54.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个实施例】、【1 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间5 年】专利权的维持时间越长,其价值对于权利人而言越高。
技术价值 31.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
23 个月独立权利要求数量
1 个从属权利要求数量
7 个说明书页数
6 页实施例个数
1 个发明人数量
6 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
1 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 7.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
院校许可备案
0 次权利质押
0 次权利转移
0 个海关备案
否法律价值 16.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
5法律状态
无权-未缴年费







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...