


【中国发明,中国发明授权】基于人体识别的自动追踪转盘底座
有权-审定授权 中国
- 申请号:
- CN202010817211.X
- 专利权人:
- 罗均海
- 授权公告日/公开日:
- 2022.04.01
- 专利有效期:
- 2020.08.14-2040.08.14
- 技术分类:
- F16:工程元件或部件;为产生和保持机器或设备的有效运行的一般措施;一般绝热
- 转化方式:
- 转让
- 价值度指数:
-
- 51.0分
- 价格:
- 面议
发布人
罗均海
联系人罗均海





- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN202010817211.X
- 申请日
- 20200814
- 公开/公告号
- CN111963838A
- 公开/公告日
- 20201120
- 申请/专利权人
- [罗均海]
- 发明/设计人
- [罗均海, 季小洁, 蔡诗伟, 夏唯一]
- 主分类号
- F16M11/04
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 上海(31)
- 颁证日
- G06T1/00
- 代理人
- [陈红桥]
摘要
本发明提供了一种基于人体识别的自动追踪转盘底座,包括:上盖,上盖用于承载目标电器设备,其中,上盖的表面开设有开口;目标识别模块,目标识别模块嵌入开口中,其中,目标识别模块用于对目标人物进行识别,并生成相应的图像信息;驱动模块,驱动模块固定在上盖上;控制模块,控制模块分别与目标识别模块和驱动模块相连,其中,控制模块用于根据图像信息生成相应的脉冲信号,并根据脉冲信号控制驱动模块进行工作,以带动上盖旋转至对应的位置;底板,底板的中央位置设置有销柱,底板通过销柱与上盖连接。由此,能够实时准确地使目标电器设备对准用户,以满足用户的需求,从而大大提高了用户的体验度。
法律状态
| 法律状态公告日 | 20220401 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
| 法律状态公告日 | 20201208 |
| 法律状态 | 实质审查的生效 |
| 法律状态信息 | 实质审查的生效 IPC(主分类):F16M 11/04 专利申请号:202010817211X 申请日:20200814 |
| 法律状态公告日 | 20201120 |
| 法律状态 | 公开 |
| 法律状态信息 | 公开 |
权利要求
权利要求数量(7)
独立权利要求数量(1)
1.一种基于人体识别的自动追踪转盘底座,其特征在于,包括:
上盖,所述上盖用于承载目标电器设备,其中,所述上盖的表面开设有开口;
目标识别模块,所述目标识别模块嵌入所述开口中,其中,所述目标识别模块用于对目标人物进行识别,并生成相应的图像信息;
驱动模块,所述驱动模块固定在所述上盖上;
控制模块,所述控制模块分别与所述目标识别模块和所述驱动模块相连,其中,所述控制模块用于根据所述图像信息生成相应的脉冲信号,并根据所述脉冲信号控制所述驱动模块进行工作,以带动所述上盖旋转至对应的位置;
底板,所述底板的中央位置设置有销柱,所述底板通过所述销柱与所述上盖连接。
2.根据权利要求1所述的基于人体识别的自动追踪转盘底座,其特征在于,所述目标识别模块包括:摄像头和固定组件,其中,
所述摄像头安装在所述固定组件上,且所述摄像头嵌入所述开口中。
3.根据权利要求1所述的基于人体识别的自动追踪转盘底座,其特征在于,还包括:内齿圈,所述内齿圈固定在所述底板上;其中,
所述驱动模块包括:步进电机以及所述步进电机上的驱动齿轮,所述步进电机固定在所述上盖上,所述驱动齿轮与所述内齿圈啮合,其中,所述控制模块具体用于,
根据所述脉冲信号控制所述步进电机转动,以带动所述驱动齿轮在内齿圈上做回转运动。
4.根据权利要求1所述的基于人体识别的自动追踪转盘底座,其特征在于,还包括:
深沟球轴承,所述深沟球轴承的内圈固定在所述销柱上,所述深沟球轴承的外圈固定在所述上盖上。
5.根据权利要求4所述的基于人体识别的自动追踪转盘底座,其特征在于,
所述深沟球轴承的内圈通过第一卡簧固定在所述销柱上,所述深沟球轴承的外圈通过第二卡簧固定在所述上盖上。
6.根据权利要求1所述的基于人体识别的自动追踪转盘底座,其特征在于,所述底板上设置有第一滚珠槽;其中,所述基于人体识别的自动追踪转盘底座还包括:
上压板,所述上压板固定在所述上盖上,所述上压板的下表面设置有第二滚珠槽,其中所述第一滚珠槽和所述第二滚珠槽对应设置;
多个滚珠,所述多个滚珠设置在所述第一滚珠槽和第二滚珠槽之间。
7.根据权利要求1-6中任一项所述的基于人体识别的自动追踪转盘底座,其特征在于,还包括:
供电模块,所述供电模块用于为所述基于人体识别的自动追踪转盘底座和所述目标电器设备供电。
说明书
技术领域
本发明涉及电器控制技术领域,具体涉及一种基于人体识别的自动追踪转盘底座。
背景技术
随着社会的进步,电器设备,例如,手机、风扇、美容仪、加湿器等设备越来越多,人们对电器设备的要求也越来越高。
相关技术中,在电器设备应用的过程中,当用户移动时电器设备无法自动调整角度对准用户,从而大大降低了用户的体验度。
发明内容
本发明为解决上述技术问题,提供了一种基于人体识别的自动追踪转盘底座,能够实时准确地使目标电器设备对准用户,以满足用户的需求,从而大大提高了用户的体验度。
本发明采用的技术方案如下:
基于人体识别的自动追踪转盘底座,包括:上盖,所述上盖用于承载目标电器设备,其中,所述上盖的表面开设有开口;目标识别模块,所述目标识别模块嵌入所述开口中,其中,所述目标识别模块用于对目标人物进行识别,并生成相应的图像信息;驱动模块,所述驱动模块固定在所述上盖上;控制模块,所述控制模块分别与所述目标识别模块和所述驱动模块相连,其中,所述控制模块用于根据所述图像信息生成相应的脉冲信号,并根据所述脉冲信号控制所述驱动模块进行工作,以带动所述上盖旋转至对应的位置;底板,所述底板的中央位置设置有销柱,所述底板通过所述销柱与所述上盖连接。
所述目标识别模块包括:摄像头和固定组件,其中,所述摄像头安装在所述固定组件上,且所述摄像头嵌入所述开口中。
基于人体识别的自动追踪转盘底座,还包括:内齿圈,所述内齿圈固定在所述底板上;其中,所述驱动模块包括:步进电机以及所述步进电机上的驱动齿轮,所述步进电机固定在所述上盖上,所述驱动齿轮与所述内齿圈啮合,其中,所述控制模块具体用于,根据所述脉冲信号控制所述步进电机转动,以带动所述驱动齿轮在内齿圈上做回转运动。
基于人体识别的自动追踪转盘底座,还包括:深沟球轴承,所述深沟球轴承的内圈固定在所述销柱上,所述深沟球轴承的外圈固定在所述上盖上。
所述深沟球轴承的内圈通过第一卡簧固定在所述销柱上,所述深沟球轴承的外圈通过第二卡簧固定在所述上盖上。
所述底板上设置有第一滚珠槽;其中,所述基于人体识别的自动追踪转盘底座还包括:上压板,所述上压板固定在所述上盖上,所述上压板的下表面设置有第二滚珠槽,其中所述第一滚珠槽和所述第二滚珠槽对应设置;多个滚珠,所述多个滚珠设置在所述第一滚珠槽和第二滚珠槽之间。
基于人体识别的自动追踪转盘底座,还包括:供电模块,所述供电模块用于为所述基于人体识别的自动追踪转盘底座和所述目标电器设备供电。
本发明的有益效果:
本发明能够实时准确地使目标电器设备对准用户,以满足用户的需求,从而大大提高了用户的体验度。
附图说明
图1为本发明实施例的基于人体识别的自动追踪转盘底座的结构示意图;
图2为本发明一个实施例的目标识别模块的结构示意图;
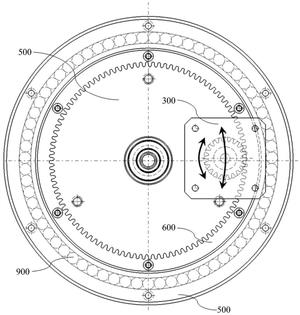
图3为本发明一个实施例的步进电机和驱动齿轮的转动方式示意图;
图4为本发明一个具体实施例的底板下拓展的支撑部件示意图;
图5为本发明一个具体实施例的基于人体识别的自动追踪转盘底座的控制方法的逻辑示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
图1是根据本发明实施例的基于人体识别的自动追踪转盘底座的结构示意图。
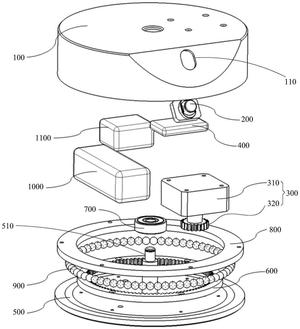
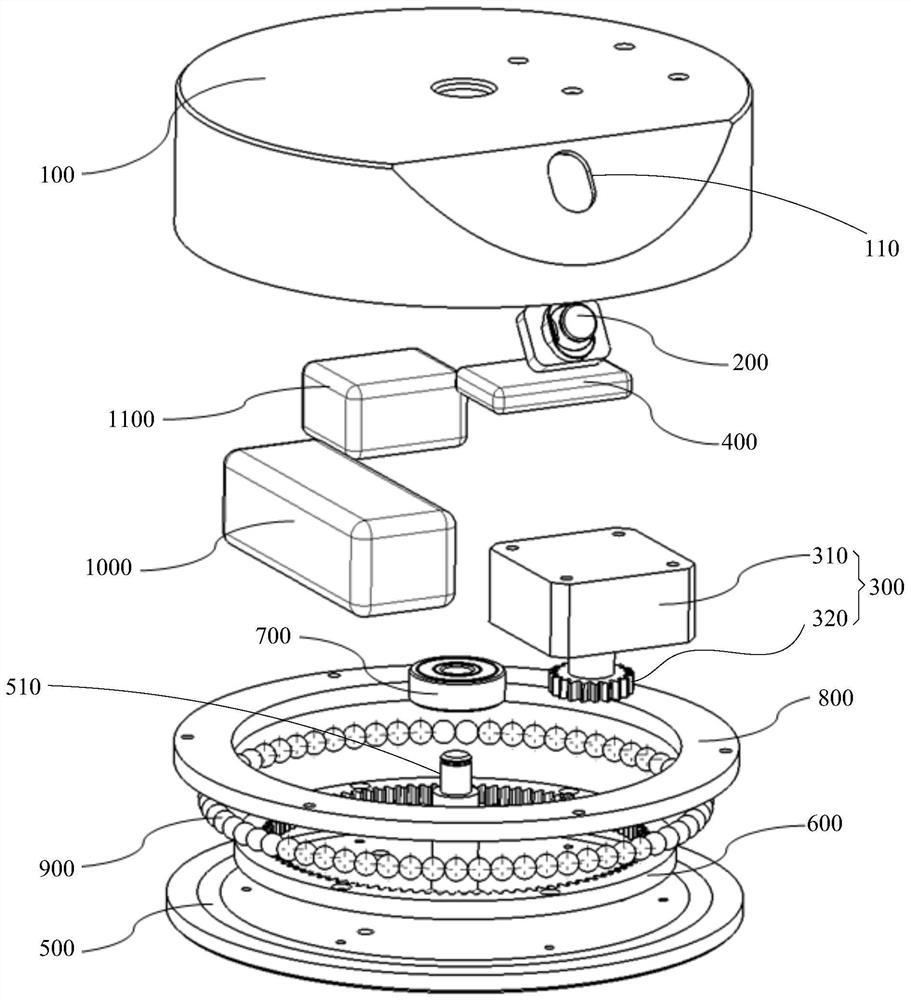
如图1所示,本发明实施例的基于人体识别的自动追踪转盘底座可包括:上盖100、目标识别模块200、驱动模块300、控制模块400和底板500。
其中,上盖100用于承载目标电器设备,其中,上盖100的表面开设有开口110;目标识别模块200嵌入开口110中,其中,目标识别模块200用于对目标人物进行识别,并生成相应的图像信息;驱动模块300固定在上盖100上;控制模块400分别与目标识别模块200和驱动模块300相连,其中,控制模块400用于根据图像信息生成相应的脉冲信号,并根据脉冲信号控制驱动模块300进行工作,以带动上盖100旋转至对应的位置;底板500的中央位置设置有销柱510,底板500通过销柱510与上盖100连接。
具体而言,目标电器设备为待控制的电器设备,即用户需要带动旋转的电器设备,例如,可为手机、风扇、美容仪、加湿器等,也就是说,当用户需要电器设备实现自动追踪时,可将该电器设备安装在上盖100的上表面,其中,上盖100的上表面还开设有其他的开口,以便于安装该电器设备。
进一步而言,在目标电器设备安装在上盖100上后,可通过嵌入上盖100上的开口110中的目标识别模块200对目标人物进行识别,并在识别到目标人物时,生成相应的图像信息。然后,通过控制模块400对该图像信息进行分析,并生成相应的脉冲信号,以对驱动模块300进行控制。
其中,该图像信息可包括目标人物在画面中的位置信息。具体地,通过控制模块400对图像信息进行分析后,可获取目标人物在画面中的位置信息,并根据该位置信息生成相应的脉冲信号,并根据该脉冲信号对驱动模块300的运行参数进行相应的控制。举例而言,当目标人物在画面中偏左时,说明此时目标电器设备未对准目标人物,此时,控制模块400可生成相应的脉冲信号,并根据该脉冲信号对驱动模块300的运行参数进行相应的控制,使得驱动模块300在以该运行参数工作时,能够带动上盖100向左旋转至恰当的位置,使得目标电器设备对准目标人物。
由此,能够实时准确地使目标电器设备对准用户,以满足用户的需求,从而大大提高了用户的体验度。
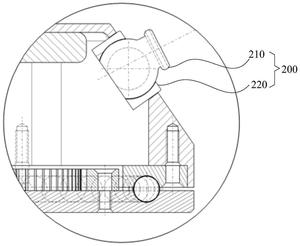
根据本发明的一个实施例,如图2所示,目标识别模块200可包括摄像头210和固定组件220。其中,摄像头210安装在固定组件220上,且摄像头210嵌入开口110中。
具体而言,如图2所示,基于上述实施例,目标识别模块200可由摄像头210和固定组件220组成,其中,摄像头210安装在固定组件220上,并且,摄像头210可以手动调整俯仰角度,配合摄像头120°的广角度取景,能够极大地提高目标识别模块200的识别范围和使用角度。
下面结合具体实施例来详细说明如何通过控制驱动模块300带动上盖100旋转至对应的位置。
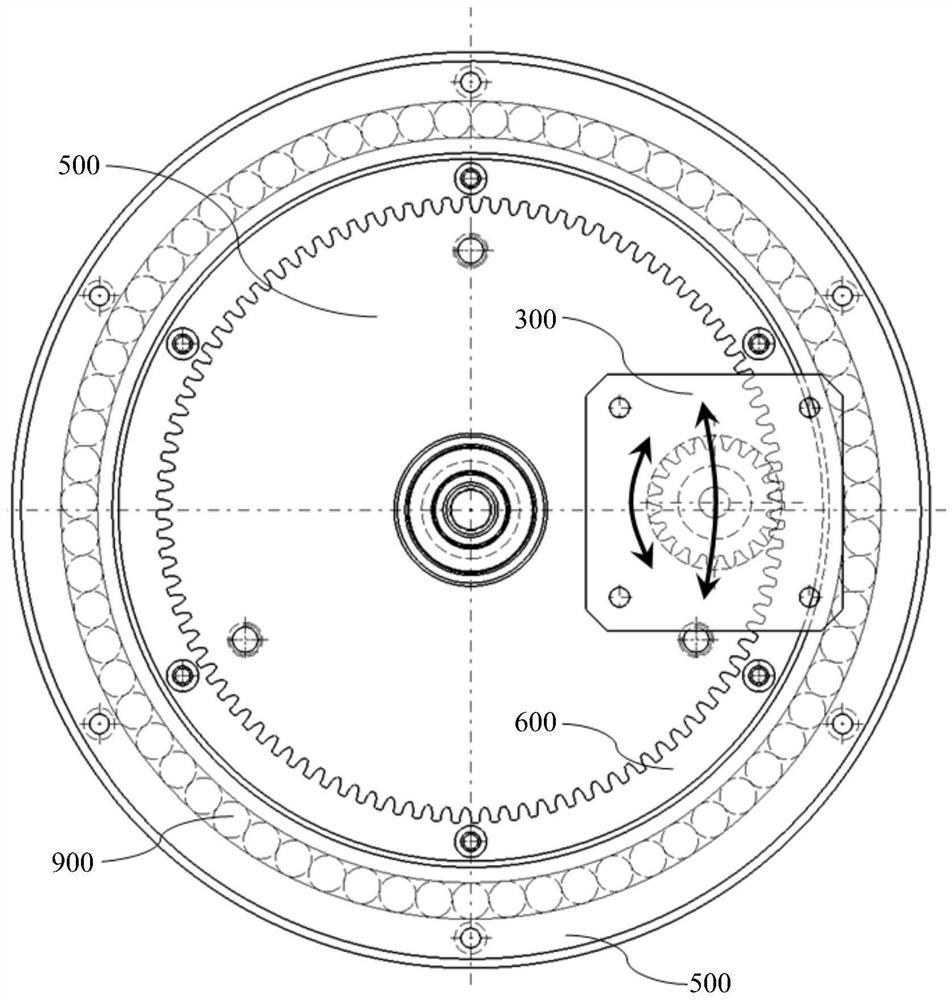
根据本发明的一个实施例,如图1所示,基于人体识别的自动追踪转盘底座还包括:内齿圈600,内齿圈600固定在底板500上,其中,内齿圈600周围均匀分布多个通孔,可采用螺栓通过通孔将内齿圈600固定在底板500上;其中,驱动模块300包括:步进电机310以及步进电机310上的驱动齿轮320,步进电机310固定在上盖100上,驱动齿轮320与内齿圈600啮合,其中,控制模块400具体用于,根据脉冲信号控制步进电机310转动,以带动驱动齿轮320在内齿圈600上做回转运动。
具体而言,如图3所示,控制模块400在对图像信息进行分析并获取目标人物在画面中的位置信息后,可根据该位置信息生成相应的脉冲信号,以对步进电机310的转动方向和转动圈数进行控制,从而带动驱动齿轮320在内齿圈600上做回转运动,其中,由于内齿圈600相对于底板500相对固定,因此,驱动齿轮320在内齿圈600上做回转运动时,可通过步进电机310推动上盖100旋转至恰当的位置,使得目标电器设备对准目标人物。
由此,基于计算机视觉处理技术进行开发,摄像头210采集视频流数据并经过控制模块400进行处理,以对目标人物进行识别,并通过控制模块400产生脉冲信号以控制步进电机310和驱动齿轮320按照指定的方向转动相应的角度,直至目标人物至于画面中央,从而采用了高精度的步进电机310作为动力,配合大减速比的内啮合齿轮组保证了自动追踪转盘底座在承受大载荷时进行实时追踪的响应速度和精度。
根据本发明的一个实施例,如图1所示,基于人体识别的自动追踪转盘底座还包括:深沟球轴承700,其中,深沟球轴承700的内圈固定在销柱510上,深沟球轴承700的外圈固定在上盖100上。
具体而言,底板500结构为圆盘状,中央位置设置有销柱510,销柱510上设置有卡簧槽结构(第一卡簧)。其中,深沟球轴承700的内圈可通过第一卡簧固定在销柱510上,以防止销柱510脱出,另外,深沟球轴承700的外圈可通过第二卡簧固定在上盖100上,以防止脱出。由此,通过深沟球轴承700保证了上盖100与底板500之间的装配关系。
根据本发明的一个实施例,如图1所示,底板500上设置有第一滚珠槽;其中,基于人体识别的自动追踪转盘底座还包括:上压板800和多个滚珠900。
其中,上压板800固定在上盖100上,上压板800的下表面设置有第二滚珠槽,其中第一滚珠槽和第二滚珠槽对应设置;多个滚珠900设置在第一滚珠槽和第二滚珠槽之间。
具体而言,上压板800可为圆盘结构,且周围均匀分分布多个沉孔,通过多个沉孔可将上压板800与上盖100装配在一起,上压板800的下表面设置有第二滚珠槽,其中,第一滚珠槽和第二滚珠槽对应设置,第一滚珠槽和第二滚珠槽合在一起可形成一个连通的滚珠通道。多个滚珠900可为球状滚珠,其中,多个滚珠900可填满滚珠通道,并在滚珠通道内自由滚动,从而提供了足够的润滑性,并且保证了自动追踪转盘底座的承载能力。
由此,通过在上压板800和底板500之间大直径的滚珠通道内布满一圈的滚珠,结合上盖的深沟球轴承,大大地提高了自动追踪转盘底座的承载能力和润滑性;
根据本发明的一个实施例,如图1所示,基于人体识别的自动追踪转盘底座还包括:供电模块1000。其中,供电模块100用于为基于人体识别的自动追踪转盘底座和目标电器设备供电。
具体而言,还可设置供电模块1000,例如可为锂电池,固定在上盖100上,以为自动追踪转盘底座内全部用电设备提供电能,并且,内置大容量锂电池在满足自动追踪转盘底座自身供电的情况下还可为自动追踪转盘底座上的目标电器设备供电。
进一步而言,根据本发明的一个实施例,如图1所示,基于人体识别的自动追踪转盘底座还包括:拓展模块1100。其中,拓展模块1100固定于上盖100,由电源管理芯片及附属外围电路组成,受控制模块400控制功能的开关,可按需求拓展无线充电、USB快速充电等技术。
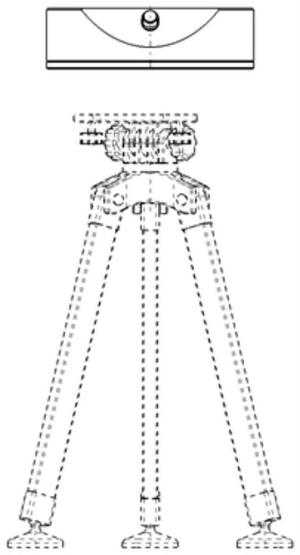
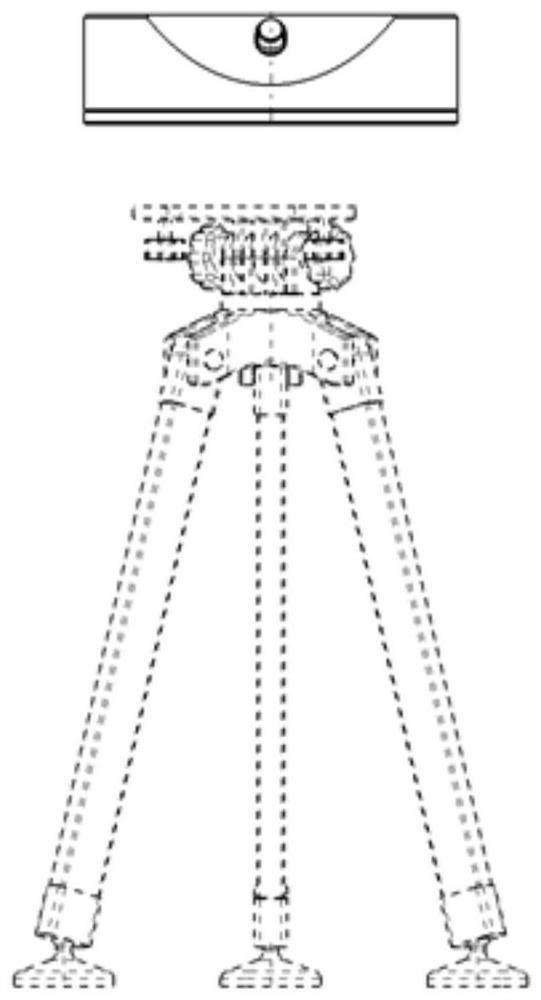
需要说明的是,如图4所示,还可在底板500上设置螺纹孔,用于安装三脚架、壁挂支架等支撑性结构,更好的满足了在不同场景下的应用。
基于上述实施例的自动追踪转盘底座,为使本领域技术人员更清楚的了解本发明,下面结合本发明的具体示例来做进一步说明。
具体而言,如图5所示,在用户将目标电器设备安装在自动追踪转盘底座的上盖100上后,可通过通讯唤醒、按键唤醒、语音唤醒等方式控制系统启动,即控制自动追踪转盘底座开始工作。此时,自动追踪转盘底座可控制上盖100自动进行左右偏转检测(偏转的角度可根据用户的需求进行设置),以通过摄像头210对目标人物进行识别,即采用基于OpenCV的行人检测算法检测是否有人出现在画面中。如果无人出现在画面中,则开始计时,并判断无人出现在画面中的持续时间是否达到5分钟,如果达到5分钟,则自动进入休眠状态,同时保留通过低频率采集照片进行差异性对比的唤醒功能直至预设时间后(例如,1小时后)关机,如果未达到5分钟,则继续进行检测,并判断是否有人出现在画面中。如果有人出现在画面中,则判断是否是单人,其中,如果是单人出现在画面中,则自动追踪该目标(追踪单人),以使目标电器设备对准目标人物,具体的追踪方式可参见上述实施例,为避免冗余,在此不再详述;如果检测到多人出现在画面中,则判断是否开启单人模式,如果开启单人模式,则通过脸部识别从目标人群中识别出常用人员,并对该目标进行追踪(追踪单人),如果未开启单人模式,则自动计算目标人群的范围,自动定位中点位置,即定位人群中心(也可通过语音设定绕人群中心左右一定角度往返转动)。当用户离开画面后,可自动进入开机时的自动搜索模式直到用户出现,或者自动关机。
由此,本发明采用先进的人体识别、语音控制和无线通讯技术,结合角度可调的摄像头、高效率处理芯片和可靠的角度调节机构等设计,能够实时准确地使目标电器设备对准用户,以满足用户的需求,从而大大提高了用户的体验度,同时,本发明的自动追踪转盘底座可广泛应用于家用、商店、工厂、室外等多场景
综上所述,根据本发明实施例的基于人体识别的自动追踪转盘底座,通过上盖承载目标电器设备,以及通过目标识别模块目标人物进行识别,并生成相应的图像信息,以及通过控制模块根据图像信息生成相应的脉冲信号,并根据脉冲信号控制驱动模块进行工作,以带动上盖旋转至对应的位置,由此,能够实时准确地使目标电器设备对准用户,以满足用户的需求,从而大大提高了用户的体验度。
在本发明的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必针对相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更多个用于实现特定逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本发明的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本发明的实施例所属技术领域的技术人员所理解。
在流程图中表示或在此以其他方式描述的逻辑和/或步骤,例如,可以被认为是用于实现逻辑功能的可执行指令的定序列表,可以具体实现在任何计算机可读介质中,以供指令执行系统、装置或设备(如基于计算机的系统、包括处理器的系统或其他可以从指令执行系统、装置或设备取指令并执行指令的系统)使用,或结合这些指令执行系统、装置或设备而使用。就本说明书而言,“计算机可读介质”可以是任何可以包含、存储、通信、传播或传输程序以供指令执行系统、装置或设备或结合这些指令执行系统、装置或设备而使用的装置。计算机可读介质的更具体的示例(非穷尽性列表)包括以下:具有一个或多个布线的电连接部(电子装置),便携式计算机盘盒(磁装置),随机存取存储器(RAM),只读存储器(ROM),可擦除可编辑只读存储器(EPROM或闪速存储器),光纤装置,以及便携式光盘只读存储器(CDROM)。另外,计算机可读介质甚至可以是可在其上打印所述程序的纸或其他合适的介质,因为可以例如通过对纸或其他介质进行光学扫描,接着进行编辑、解译或必要时以其他合适方式进行处理来以电子方式获得所述程序,然后将其存储在计算机存储器中。
应当理解,本发明的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。例如,如果用硬件来实现,和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(PGA),现场可编程门阵列(FPGA)等。
本技术领域的普通技术人员可以理解实现上述实施例方法携带的全部或部分步骤是可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,该程序在执行时,包括方法实施例的步骤之一或其组合。
此外,在本发明各个实施例中的各功能单元可以集成在一个处理模块中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用软件功能模块的形式实现。所述集成的模块如果以软件功能模块的形式实现并作为独立的产品销售或使用时,也可以存储在一个计算机可读取存储介质中。
上述提到的存储介质可以是只读存储器,磁盘或光盘等。尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
价值度评估
技术价值
经济价值
法律价值
0 0 051.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:51.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个实施例】、【5 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间4 年】专利权的维持时间越长,其价值对于权利人而言越高。
技术价值 30.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
19 个月独立权利要求数量
1 个从属权利要求数量
5 个说明书页数
6 页实施例个数
1 个发明人数量
4 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
5 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 6.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
个人许可备案
0 次权利质押
0 次权利转移
0 个海关备案
否法律价值 15.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
4法律状态
有权-审定授权







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...