





【中国实用新型】机器人协焊用随动式工装
无权-未缴年费 中国
- 申请号:
- CN201720703641.2
- 专利权人:
- 常州机电职业技术学院
- 授权公告日/公开日:
- 2018.01.09
- 专利有效期:
- 2017.06.16-2027.06.16
- 技术分类:
- B23:机床;其他类目中不包括的金属加工
- 转化方式:
- 转让
- 价值度指数:
-
- 58.0分
- 价格:
- 面议
发布人
常州机电职业技术学院
联系人何老师
-

- 0519-88238869

-

- 302910554
-

- 13151263266

- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201720703641.2
- 申请日
- 20170616
- 公开/公告号
- CN206854912U
- 公开/公告日
- 20180109
- 申请/专利权人
- [常州机电职业技术学院]
- 发明/设计人
- [钱金法, 周英华]
- 主分类号
- B23K37/04
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 江苏(32)
- 颁证日
- G06T1/00
- 代理人
- [孙彬]
摘要
本实用新型公开了一种机器人协焊用随动式工装,包括抓手和支架;所述支架由横向支架和纵向支架组成,所述横向支架和所述纵向支架交叉连接,所述横向支架和所述纵向支架的两端均固定连接有夹具,用于夹持待焊接的细小管件;所述抓手,用于夹持住所述支架,所述抓手包括双向气缸,双向气缸的两端均连接有夹板,构成夹板对,双向气缸带动夹板对开合完成夹取支架与松开支架的动作;本实用新型设置支架,通过设置在支架上的夹具,实现细小管件的固定,抓手抓取支架,抓手与支架共同安装在协焊机器人上,可随协焊机器人进行随意位置调整,方便焊接机器人完成焊接操作。
法律状态
| 法律状态公告日 | 20240702 |
| 法律状态 | 专利权的终止 |
| 法律状态信息 | 未缴年费专利权终止 IPC(主分类):B23K 37/04 专利号:ZL2017207036412 申请日:20170616 授权公告日:20180109 终止日期: |
| 法律状态公告日 | 20180109 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
权利要求
权利要求数量(6)
独立权利要求数量(1)
1.一种机器人协焊用随动式工装,其特征在于:包括抓手(1)和支架;
所述支架由横向支架(2)和纵向支架(3)组成,所述横向支架(2)和所述纵向支架(3)交 叉连接,所述横向支架(2)和所述纵向支架(3)的两端均固定连接有夹具(4),用于夹持待焊 接的细小管件;
所述抓手(1),用于夹持住所述支架,所述抓手包括双向气缸(5),双向气缸(5)的两端 均连接有夹板(6),构成夹板对,双向气缸(5)带动夹板对开合完成夹取支架与松开支架的 动作。
2.根据权利要求1所述的机器人协焊用随动式工装,其特征在于:所述夹板(6)具有夹 头(7),该夹头(7)的边缘均设置有倒角,所述夹头(7)的夹持面上安装有两个夹块(8),所述 夹块(8)与所夹持的支架接触的一侧也设置有倒角。
3.根据权利要求1所述的机器人协焊用随动式工装,其特征在于:所述支架由铝合金材 料制成。
4.根据权利要求1所述的机器人协焊用随动式工装,其特征在于:所述双向气缸(5)由 电磁阀控制,以便连接于协焊机器人上。
5.根据权利要求1所述的机器人协焊用随动式工装,其特征在于:所述横向支架(2)设 置有两个,对称分布在纵向支架(3)上,且横向支架(2)与纵向支架(3)垂直设置,所述横向 支架(2)的垂直距离与夹头(7)的宽度相适应。
6.根据权利要求5所述的机器人协焊用随动式工装,其特征在于:所述夹头(7)上两块 夹块(8)的间距与纵向支架(3)的厚度相适应。
1.一种机器人协焊用随动式工装,其特征在于:包括抓手(1)和支架;
所述支架由横向支架(2)和纵向支架(3)组成,所述横向支架(2)和所述纵向支架(3)交叉连接,所述横向支架(2)和所述纵向支架(3)的两端均固定连接有夹具(4),用于夹持待焊接的细小管件;
所述抓手(1),用于夹持住所述支架,所述抓手包括双向气缸(5),双向气缸(5)的两端均连接有夹板(6),构成夹板对,双向气缸(5)带动夹板对开合完成夹取支架与松开支架的动作。
2.根据权利要求1所述的机器人协焊用随动式工装,其特征在于:所述夹板(6)具有夹头(7),该夹头(7)的边缘均设置有倒角,所述夹头(7)的夹持面上安装有两个夹块(8),所述夹块(8)与所夹持的支架接触的一侧也设置有倒角。
3.根据权利要求1所述的机器人协焊用随动式工装,其特征在于:所述支架由铝合金材料制成。
4.根据权利要求1所述的机器人协焊用随动式工装,其特征在于:所述双向气缸(5)由电磁阀控制,以便连接于协焊机器人上。
5.根据权利要求1所述的机器人协焊用随动式工装,其特征在于:所述横向支架(2)设置有两个,对称分布在纵向支架(3)上,且横向支架(2)与纵向支架(3)垂直设置,所述横向支架(2)的垂直距离与夹头(7)的宽度相适应。
6.根据权利要求5所述的机器人协焊用随动式工装,其特征在于:所述夹头(7)上两块夹块(8)的间距与纵向支架(3)的厚度相适应。
说明书
技术领域
本实用新型涉及一种机器人协焊用随动式工装,属于机器人技术领域。
背景技术
目前我国细小管件焊接多以人工焊接为主,在人力资源、人身安全、生产成本、生产效率等多方面存在诸多问题。为解决上述问题,企业已将目光转向机器人自动焊接生产,一般工装安放于变位机上,使用变位机则成本较高,焊接方位的转换难度较大。
发明内容
本实用新型所要解决的技术问题是:克服现有技术的不足,提供一种机器人协焊用随动式工装,以解决细小管件的定位与变位问题,以便焊接机器人焊接。
为了解决上述技术问题,本实用新型的技术方案是:一种机器人协焊用随动式工装,包括抓手和支架;所述支架由横向支架和纵向支架组成,所述横向支架和所述纵向支架交叉连接,所述横向支架和所述纵向支架的两端均固定连接有夹具,用于夹持待焊接的细小管件;所述抓手,用于夹持住所述支架,所述抓手包括双向气缸,双向气缸的两端均连接有夹板,构成夹板对,双向气缸带动夹板对开合完成夹取支架与松开支架的动作。
进一步,所述夹板具有夹头,该夹头的边缘均设置有倒角,所述夹头的夹持面上安装有两个夹块,所述夹块与所夹持的支架接触的一侧也设置有倒角。
进一步,所述支架由铝合金材料制成。
进一步,所述双向气缸由电磁阀控制,以便连接于协焊机器人上。
进一步,所述横向支架设置有两个,对称分布在纵向支架上,且横向支架与纵向支架垂直设置,所述横向支架的垂直距离与夹头的宽度相适应。
进一步,所述夹头上两块夹块的间距与纵向支架的厚度相适应。
采用了上述技术方案,本实用新型具有以下的有益效果:
1、本实用新型设置支架,通过设置在支架上的夹具,实现细小管件的固定,抓手抓取支架,抓手与支架共同安装在协焊机器人上,可随协焊机器人进行随意位置调整,方便焊接机器人完成焊接操作;
2、本实用新型的抓手采用微偏差设计,即夹头和夹块都具有倒角,抓手抓取支架时,通过夹头的倒角自动调整落入纵向支架的两侧,通过双向气缸带动夹头动作,通过夹块的倒角自动调整位置夹住纵向支架;
3、本实用新型的支架结构简洁,制作成本低,支架采用铝合金材料,轻型化设计。
附图说明
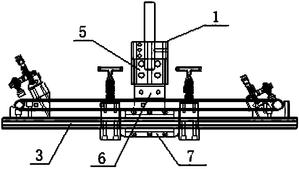
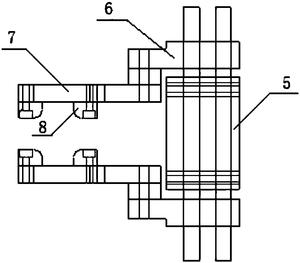
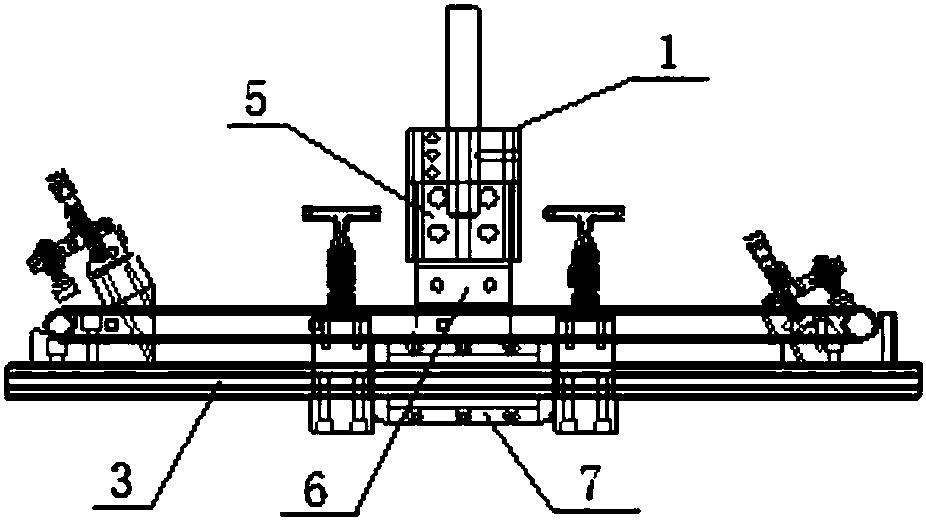
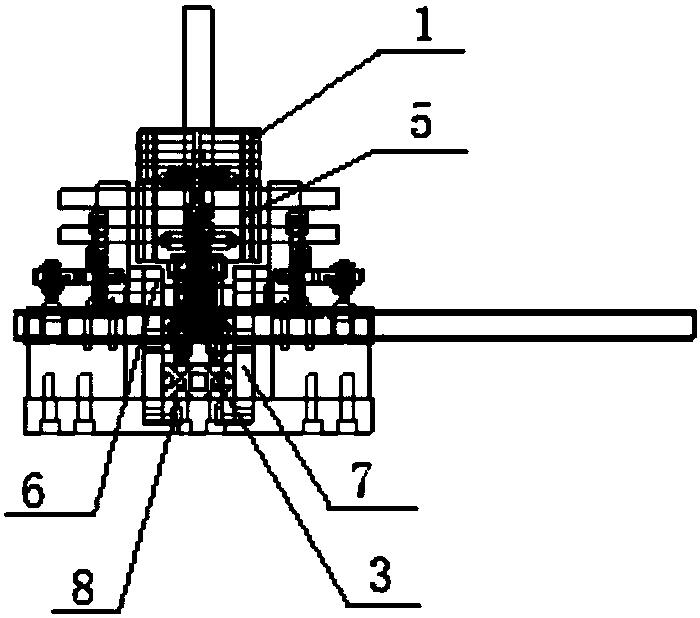
图1为本实用新型的机器人协焊用随动式工装的主视示意图;
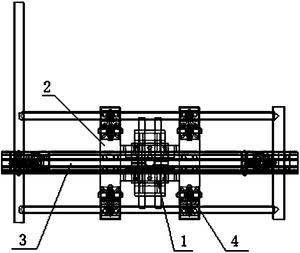
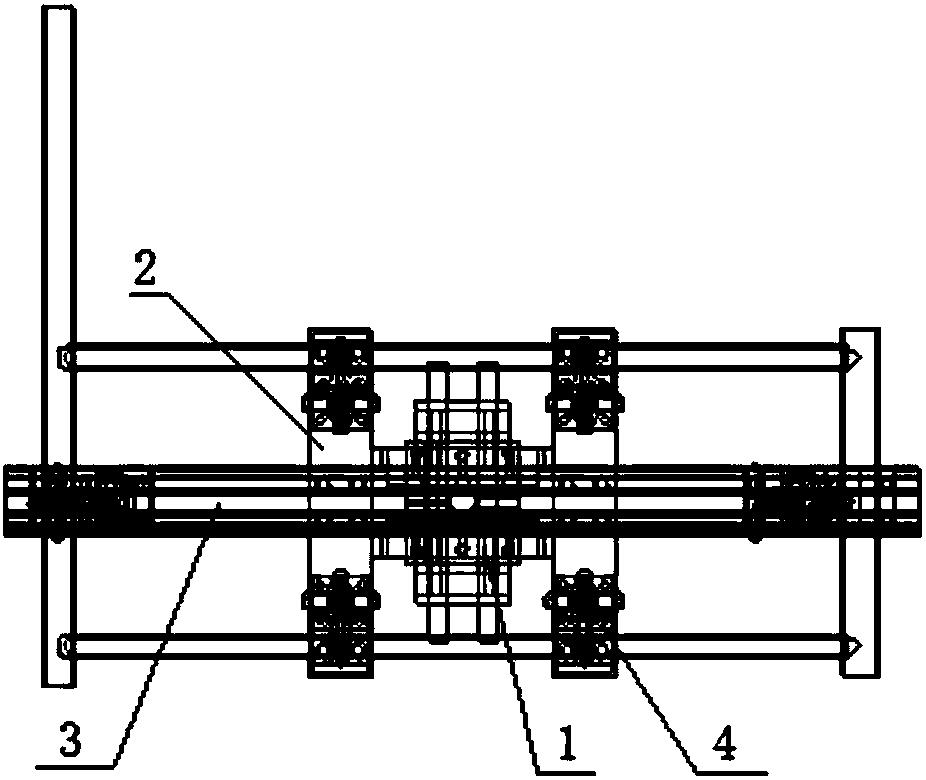
图2为图1的仰视示意图;
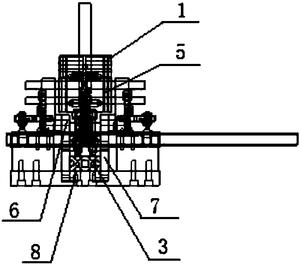
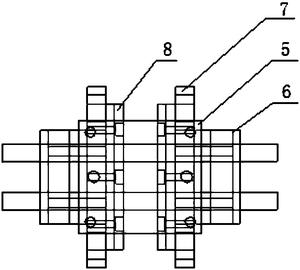
图3为图1的左视示意图;
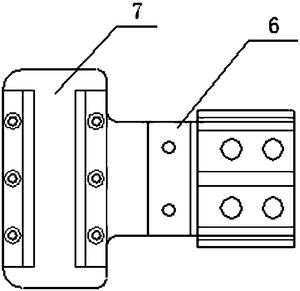
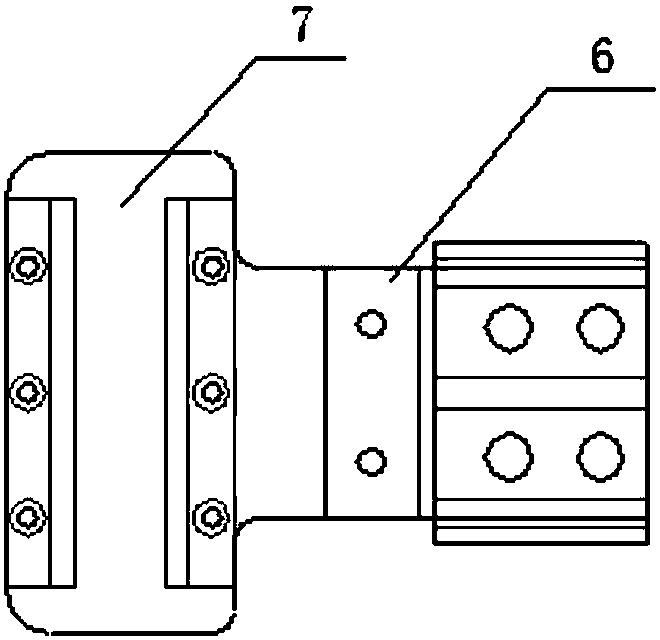
图4为本实用新型的抓手的主视图;
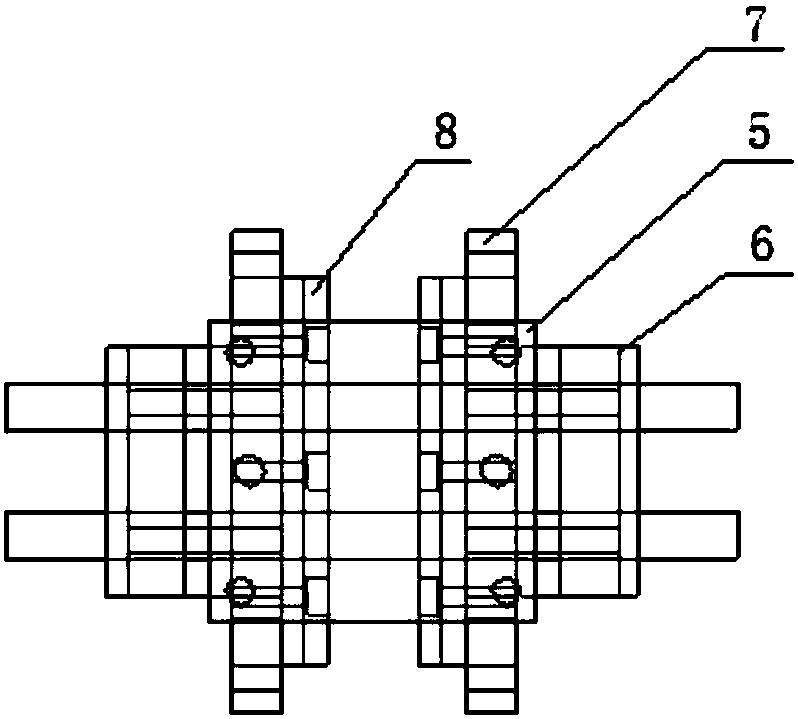
图5为图4的仰视图;
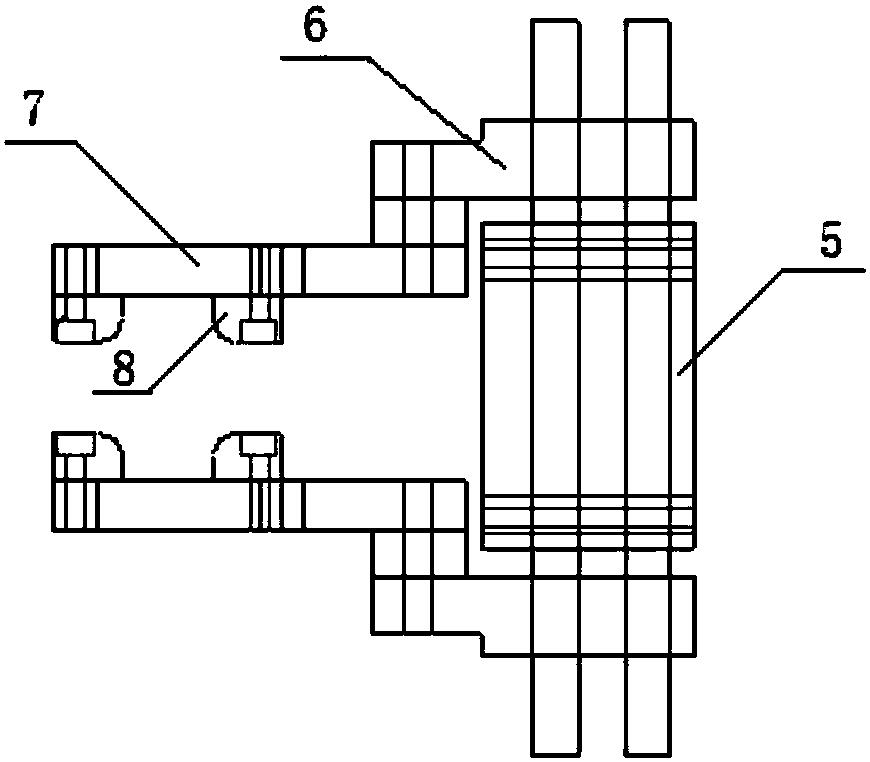
图6为图4的左视图。
具体实施方式
为了使本实用新型的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本实用新型作进一步详细的说明。
如图1~6所示,一种机器人协焊用随动式工装,包括抓手1和支架;
所述支架由横向支架2和纵向支架3组成,所述横向支架2和所述纵向支架3交叉连接,本实施例中,所述横向支架2和所述纵向支架3为垂直交叉连接,横向支架2和所述纵向支架3的两端均固定连接有夹具4,用于夹持待焊接的细小管件;
所述抓手1,用于夹持住所述支架,所述抓手包括双向气缸5,双向气缸5的两端均连接有夹板6,构成夹板对,双向气缸5带动夹板对开合完成夹取支架与松开支架的动作。
如图4所示,所述夹板6具有夹头7,该夹头7的边缘均设置有倒角,所述夹头7的夹持面上安装有两个夹块8,所述夹块8与所夹持的支架接触的一侧也设置有倒角。
如图1、2所示,所述支架由铝合金材料制成。
如图1、2、3所示,所述双向气缸5由电磁阀控制,以便连接于协焊机器人上。抓手1采用电磁阀控制的双向气缸5控制,双向气缸5在电磁阀的控制下打开或闭合,实现夹取或放下工件。
如图1所示,所述横向支架2设置有两个,对称分布在纵向支架3上,且横向支架2与纵向支架3垂直设置,所述横向支架2的垂直距离与夹头7的宽度相适应,以便于夹头7伸入两横向支架2之间夹持纵向支架3。
如图3所示,所述夹头7上两块夹块8的间距与纵向支架3的厚度相适应,从而将纵向支架3夹持固定在两块夹块8之间。
本实用新型的工作原理如下:
在焊接时由人工将待焊接的管件固定在横向支架2、纵向支架3两端的夹具4上;由协焊机器人控制抓手1运动到准确抓取位置,由电磁阀控制的双向气缸5带动夹板6打开;由于支架的位置有可能出现偏差,此时夹头7与支架可自动适应,然后电磁阀控制双向气缸5闭合,通过带有倒角的夹块8与纵向支架3的配合,保证支架处于相对精确的位置而夹紧;最后协焊机器人带动整个工装运动到相应的位置实现焊接,保证焊接时位置的偏差在一定的范围内,本工装保证在0.3mm内,符合焊接要求。
本实用新型设置支架,通过设置在支架上的夹具,实现细小管件的固定,抓手抓取支架,抓手与支架共同安装在协焊机器人上,可随协焊机器人进行随意位置调整,方便焊接机器人完成焊接操作。
本实用新型的抓手采用微偏差设计,即夹头7和夹块8都具有倒角,抓手抓取支架时,通过夹头7的倒角自动调整落入纵向支架3的两侧,通过双向气缸5带动夹头7动作,通过夹块8的倒角自动调整位置夹住纵向支架3。
本实用新型的支架结构简洁,制作成本低,支架采用铝合金材料,轻型化设计。
以上所述的具体实施例,对本实用新型解决的技术问题、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
价值度评估
技术价值
经济价值
法律价值
0 0 058.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:58.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个实施例】、【4 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【被引用次数1 次】专利被引次数越多越能能够体现出该专利在相关技术领域研发中所发挥的基础性作用,代表着专利公开的内容有更多的产业利用价值。 【专利权的维持时间7 年】专利权的维持时间越长,其价值对于权利人而言越高。
技术价值 32.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
6 个月独立权利要求数量
1 个从属权利要求数量
5 个说明书页数
3 页实施例个数
1 个发明人数量
2 个被引用次数
1 次引用文献数量
1 个优先权个数
0 个技术分类数量
4 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 7.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
院校许可备案
0 次权利质押
0 次权利转移
0 个海关备案
否法律价值 19.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
7法律状态
无权-未缴年费







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...