【中国发明,中国发明授权】一种基于Powerlink的机器人控制方法
无权-未缴年费 中国
- 申请号:
- CN201310361763.4
- 专利权人:
- 电子科技大学
- 授权公告日/公开日:
- 2016.04.06
- 专利有效期:
- 2013.08.19-2033.08.19
- 技术分类:
- B25:手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手
- 转化方式:
- 转让
- 价值度指数:
-
- 57.0分
- 价格:
- 面议
发布人
知识产权运营中心
联系人IP先生
-

- 15113831943
-

- 9411117419@qq.com
-

- 941117419
-

- szhf1188(加微信)
-

- 深圳市南山区粤海街道100号
- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201310361763.4
- 申请日
- 20130819
- 公开/公告号
- CN103448062A
- 公开/公告日
- 20131218
- 申请/专利权人
- [电子科技大学]
- 发明/设计人
- [刘霖, 张峰, 刘文聪, 郭涛, 杨先明, 陈镇龙, 罗颖, 宋昀岑, 刘娟秀]
- 主分类号
- B25J9/18
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 中国,CN,四川(51)
- 颁证日
- G06T1/00
- 代理人
- [刘兴亮]
摘要
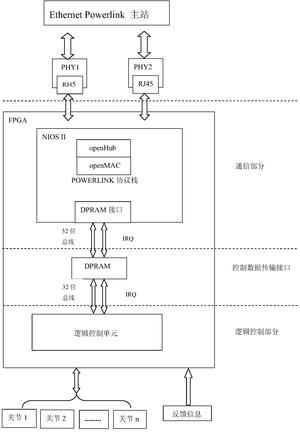
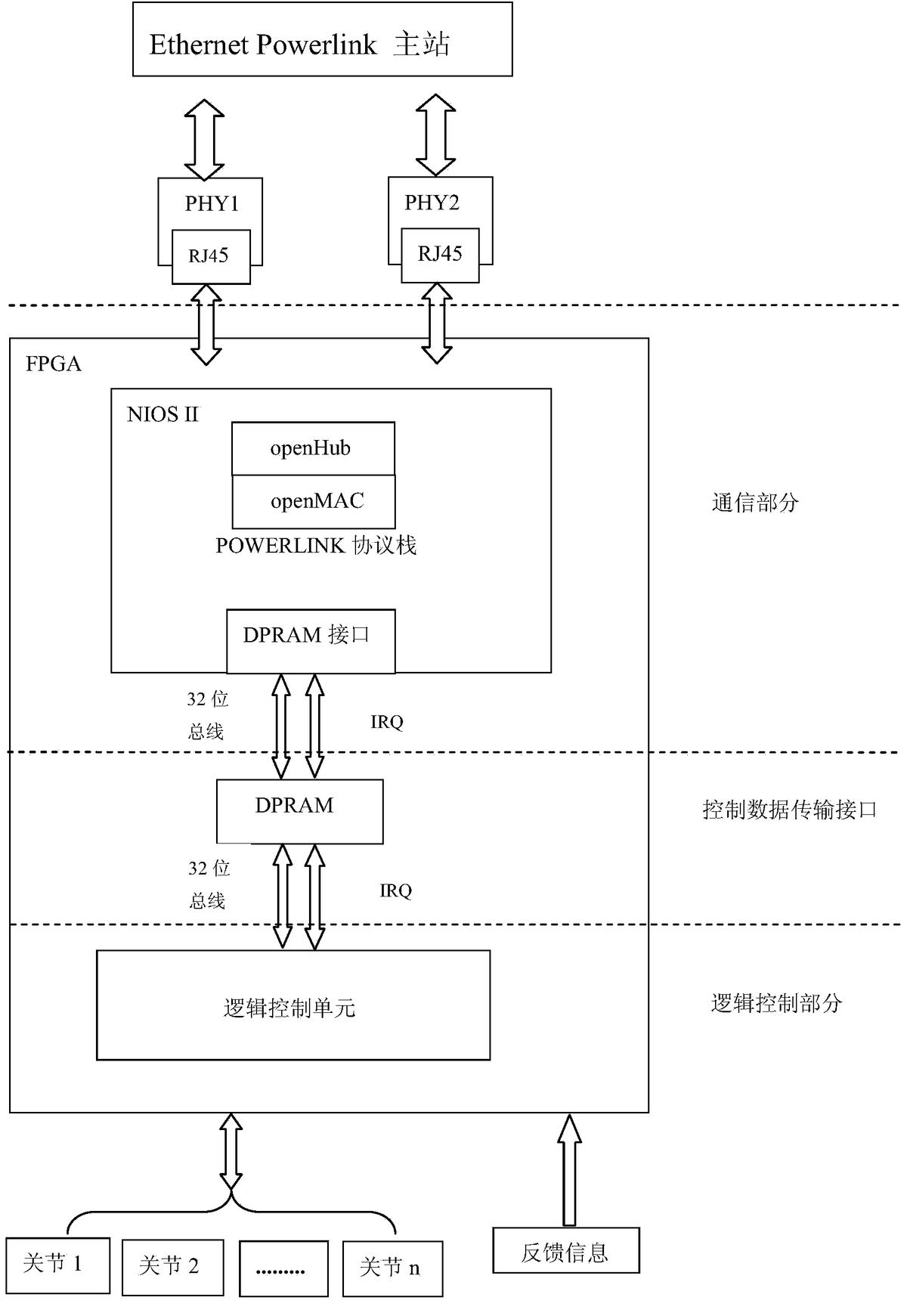
本发明公开了一种基于Powerlink的机器人控制方法,包括Ethernet Powerlink主站和FPGA从站,所述FPGA从站由通信部分、控制数据传输接口和逻辑控制部分组成,所述通信部分包括软核处理器,控制数据传输接口包括DPRAM,所述逻辑控制部分由逻辑控制单元组成,所述软核处理器上设有DPRAM控制模块。与现有技术相比,本发明中通信部分用来实现从站的Powerlink协议,主站通过以太网和从站传输数据,而且在保证数据传输高速的同时也确保了数据的完整性和不丢失性,机器人控制信息和传感器等反馈信息能够达到ms级的刷新速度,使得机器人的性能得到大幅度的提升。
法律状态
| 法律状态公告日 | 20240816 |
| 法律状态 | 专利权的终止 |
| 法律状态信息 | 未缴年费专利权终止 IPC(主分类):B25J 9/18 专利号:ZL2013103617634 申请日:20130819 授权公告日:20160406 终止日期: |
| 法律状态公告日 | 20160406 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
| 法律状态公告日 | 20140115 |
| 法律状态 | 实质审查的生效 |
| 法律状态信息 | 实质审查的生效IPC(主分类):B25J 9/18申请日:20130819 |
| 法律状态公告日 | 20131218 |
| 法律状态 | 公开 |
| 法律状态信息 | 公开 |
权利要求
权利要求数量(6)
独立权利要求数量(1)
1.一种基于Powerlink的机器人控制方法,包括Ethernet Powerlink主 站和FPGA从站,其特征在于:所述FPGA从站由通信部分、控制数据传输接口 和逻辑控制部分组成,所述通信部分包括软核处理器,所述控制数据传输接口 包括DPRAM,所述逻辑控制部分由逻辑控制单元组成,所述软核处理器上设有 DPRAM控制模块,所述软核处理器的信号端通过DPRAM控制模块与DPRAM的信 号端双向连通,所述DPRAM的数据接口与逻辑控制单元的信号端双向连通。
2.根据权利要求1所述的一种基于Powerlink的机器人控制方法,其特征 在于:所述Ethernet Powerlink主站通过网卡PHY1、PHY2上的RJ45接口与 FPGA从站的通信部分双向连通。
3.根据权利要求1所述的一种基于Powerlink的机器人控制方法,其特征 在于:所述通信部分的软核处理器为Nios II系列32位RSIC嵌入式处理器。
4.根据权利要求3所述的一种基于Powerlink的机器人控制方法,其特征 在于:所述DPRAM控制模块与DPRAM之间采用32位的总线连通进行数据传输。
5.根据权利要求3所述的一种基于Powerlink的机器人控制方法,其特征 在于:所述DPRAM与逻辑控制单元之间采用32位的总线连通进行数据传输。
6.根据权利要求1所述的一种基于Powerlink的机器人控制方法,其特 征在于:所述逻辑控制模块通过与DPRAM的接口读取相应的指令数据,用来对 机器人的关节产生控制,控制机器人的控制信息和反馈信息通过信息反馈电路 反馈到逻辑控制单元。
1.一种基于Powerlink的机器人控制方法,包括Ethernet Powerlink主站和FPGA从站,其特征在于:所述FPGA从站由通信部分、控制数据传输接口和逻辑控制部分组成,所述通信部分包括软核处理器,所述控制数据传输接口包括DPRAM,所述逻辑控制部分由逻辑控制单元组成,所述软核处理器上设有DPRAM控制模块,所述软核处理器的信号端通过DPRAM控制模块与DPRAM的信号端双向连通,所述DPRAM的数据接口与逻辑控制单元的信号端双向连通。
2.根据权利要求1所述的一种基于Powerlink的机器人控制方法,其特征在于:所述Ethernet Powerlink主站通过网卡PHY1、PHY2上的RJ45接口与FPGA从站的通信部分双向连通。
3.根据权利要求1所述的一种基于Powerlink的机器人控制方法,其特征在于:所述通信部分的软核处理器为Nios II系列32位RSIC嵌入式处理器。
4.根据权利要求3所述的一种基于Powerlink的机器人控制方法,其特征在于:所述DPRAM控制模块与DPRAM之间采用32位的总线连通进行数据传输。
5.根据权利要求3所述的一种基于Powerlink的机器人控制方法,其特征在于:所述DPRAM与逻辑控制单元之间采用32位的总线连通进行数据传输。
6.根据权利要求1所述的一种基于Powerlink的机器人控制方法,其特征在于:所述逻辑控制模块通过与DPRAM的接口读取相应的指令数据,用来对机器人的关节产生控制,控制机器人的控制信息和反馈信息通过信息反馈电路反馈到逻辑控制单元。
说明书
技术领域
本发明涉及一种数据传输接口,尤其涉及一种基于Powerlink的机器人控制方法。
背景技术
随着科技的发展,机器人现在已经不再仅限于理论研究阶段,很多工业生产和生活中都可以看到机器人的运用,比如水平四轴机器人就可以运用于:搬运,点胶,雕刻等等场合。所以机器人对社会生产力,特别是工业自动化有着非常重要的影响。但是应用场合的不断增多,应用环境越来越复杂都对机器人的性能提出了挑战,比如在搬运作业当中,为了使生产效率提高,必然要加快机器人的运动速度,为了能够使机器人运动地更快控制系统的指令传输和信息反馈也要更快,常用的数据传输接口控制方案限制了机器人的性能提升,比如基于串口的机器人控制,由于串口传输速度和抗干扰能力的缺陷不适合在实时要求很高的机器人中使用。在已有的接口控制中USB和以太网是传输速度相对较快的接口,但是USB的传输受距离的影响很大,不适合工业运用的场合。
普通的以太网是基于载波监听/检测CSMA/CD实现介质访问控制,在当一个数据产生冲突时,其等待时间具有不确定性,所以运用到机器人现场设备时,实时通信不能得到满足,致使以太网技术不能在工业底层设备中有效运用。
发明内容
本发明的目的就在于提供一种解决了上述问题且基于Powerlink的机器人控制方法。
为了实现上述目的,本发明采用的技术方案是:一种基于Powerlink的机器人控制方法,包括Ethernet Powerlink主站和FPGA从站,所述FPGA从站由通信部分、控制数据传输接口和逻辑控制部分组成,所述通信部分包括软核处理器,所述控制数据传输接口包括DPRAM,所述逻辑控制部分由逻辑控制单元组成,所述软核处理器上设有DPRAM控制模块,所述软核处理器的信号端通过DPRAM控制模块与DPRAM的信号端双向连通,所述DPRAM的数据接口与逻辑控制单元的信号端双向连通;
作为优选,所述Ethernet Powerlink主站通过网卡PHY1、PHY2上的RJ45接口与FPGA从站的通信部分双向连通;
作为优选,所述通信部分的软核处理器为Nios II系列32位RSIC嵌入式处理器;
作为优选,所述DPRAM控制模块与DPRAM之间采用32位的总线连通进行数据传输;
作为优选,所述DPRAM与逻辑控制单元之间采用32位的总线连通进行数据传输;
作为优选,所述逻辑控制模块通过与DPRAM的接口读取相应的指令数据,用来对机器人的关节产生控制,控制机器人的控制信息和反馈信息通过信息反馈电路反馈到逻辑控制单元。
与现有技术相比,本发明的优点在于:本发明中通信部分用来实现从站的Powerlink协议,主站通过以太网和从站传输数据,在Nios II软核处理器中加入了DPRAM控制模块,用来将以太网传输的数据通过32位的总线存储到DPRAM中,这样在保证数据传输高速的同时也确保了数据的完整性和不丢失性。在DPRAM片上存储的后级便是逻辑控制单元,逻辑控制模块通过与DPRAM的接口读取相应的指令数据,用来对关节产生控制。由于Powerlink的高实时性能,机器人控制信息和传感器等反馈信息能够达到ms级的刷新速度,使得机器人的性能得到大幅度的提升。
附图说明
图1为本发明的原理框图。
具体实施方式
以上对本发明所提供的一种基于Powerlink的机器人控制方法进行了详尽介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,对本发明的变更和改进将是可能的,而不会超出附加权利要求所规定的构思和范围,综上所述,本说明书内容不应理解为对本发明的限制。
价值度评估
技术价值
经济价值
法律价值
0 0 057.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:57.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间11 年】专利权的维持时间越长,其价值对于权利人而言越高。
技术价值 31.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
31 个月独立权利要求数量
0 个从属权利要求数量
0 个说明书页数
3 页实施例个数
0 个发明人数量
9 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
1 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 7.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
院校许可备案
0 次权利质押
0 次权利转移
0 个海关备案
否法律价值 19.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
11法律状态
无权-未缴年费







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...