

【中国发明,中国发明授权】一种具有主动进攻能力的调节式武术训练桩及其训练方法
无权-未缴年费 中国
- 申请号:
- CN201410590223.8
- 专利权人:
- 王涛
- 授权公告日/公开日:
- 2016.08.24
- 专利有效期:
- 2014.10.29-2034.10.29
- 技术分类:
- A63:运动;游戏;娱乐活动
- 转化方式:
- 转让
- 价值度指数:
-
- 55.0分
- 价格:
- ¥10000.00
发布人
王涛
联系人王涛





- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201410590223.8
- 申请日
- 20141029
- 公开/公告号
- CN104258552A
- 公开/公告日
- 20150107
- 申请/专利权人
- [王涛]
- 发明/设计人
- [王涛, 赵雪虎, 王德威, 姚森]
- 主分类号
- A63B69/22
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 安徽(34)
- 颁证日
- G06T1/00
- 代理人
摘要
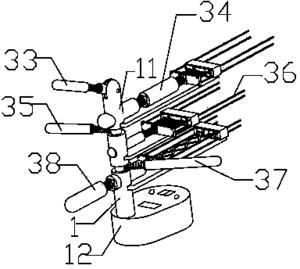
本发明涉及体育训练器材领域,具体地说是一种具有主动进攻能力的调节式武术训练桩及其训练方法。本发明的一种具有主动进攻能力的调节式武术训练桩,包括主体、控制系统和仿进攻系统;主体包括圆柱体、底座和支座;控制系统包括开关、模式选择按钮、力度旋钮、速度旋钮和液晶显示屏;仿进攻系统包括伸缩装置、旋转装置、仿劈拳装置、仿直拳装置、仿摆拳装置、仿勾拳装置、仿鞭腿装置和仿蹬腿装置;控制系统控制训练桩的工作状态;仿劈拳装置、仿直拳装置、仿摆拳装置、仿勾拳装置、仿鞭腿装置和仿蹬腿装置由上而下依次安装在主体上,用于模仿真实的攻击动作。本发明进攻动作全面、安全、逼真,功能全面,并能够满足不同水平学习者的需求,解决了现有技术与真实对抗差距大、适用范围窄的难题。
法律状态
| 法律状态公告日 | 20241025 |
| 法律状态 | 专利权的终止 |
| 法律状态信息 | 未缴年费专利权终止 IPC(主分类):A63B 69/22 专利号:ZL2014105902238 申请日:20141029 授权公告日:20160824 终止日期: |
| 法律状态公告日 | 20210105 |
| 法律状态 | 专利申请权、专利权的转移 |
| 法律状态信息 | 专利权的转移 IPC(主分类):A63B 69/22 专利号:ZL2014105902238 登记生效日:20201223 变更事项:专利权人 变更前权利人:王涛 变更后权利人:铜陵鑫隆钢结构有限公司 变更事项:地址 变更前权利人:232000 安徽省淮南市田家庵区安徽理工大学本部 变更后权利人:244100 安徽省铜陵市义安区钟鸣镇金龙村321省道 |
| 法律状态公告日 | 20160824 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
| 法律状态公告日 | 20150311 |
| 法律状态 | 实质审查的生效 |
| 法律状态信息 | 实质审查的生效 IPC(主分类):A63B 69/22 申请日:20141029 |
| 法律状态公告日 | 20150107 |
| 法律状态 | 公开 |
| 法律状态信息 | 公开 |
| 事务数据公告日 | 20210105 |
| 事务数据类型 | 专利申请权、专利权的转移 |
| 转让详情 | 专利权的转移 IPC(主分类):A63B 69/22 专利号:ZL2014105902238 登记生效日:20201223 变更事项:专利权人 变更前权利人:王涛 变更后权利人:铜陵鑫隆钢结构有限公司 变更事项:地址 变更前权利人:232000 安徽省淮南市田家庵区安徽理工大学本部 变更后权利人:244100 安徽省铜陵市义安区钟鸣镇金龙村321省道 |
权利要求
权利要求数量(6)
独立权利要求数量(2)
1.一种具有主动进攻能力的调节式武术训练桩,包括主体(1)和控制系统,其特征在于:还包括仿进攻系统;
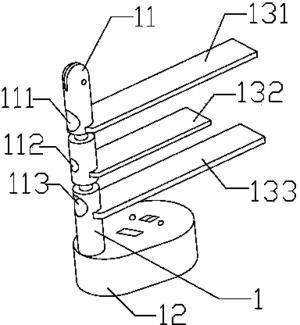
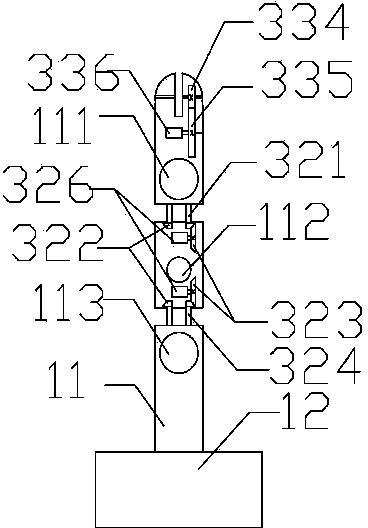
所述的主体(1)包括圆柱体(11)、底座(12)和支座;所述的圆柱体(11)呈内部中空状,并垂直固定安装在底座(12)上表面前部;所述的支座有3个,分别为支座A(131)、支座B(132)和支座C(133),呈长方形板状结构,从上至下分别均匀垂直焊接在圆柱体(11)后侧;所述的圆柱体(11)从上至下还均匀开有3个圆形通孔,分别是通孔A(111)、通孔B(112)和通孔C(113),3个圆形通孔下边缘分别与所述的3个支座之间留有间隙;所述的圆柱体(11)在3个圆形通孔之间开有2个环形凹槽,圆柱体(11)最上端还开有半圆形凹槽;
所述的控制系统包括开关(21)、模式选择按钮(22)、力度旋钮(24)、速度旋钮(25)、液晶显示屏(26);所述的开关(21)、模式选择按钮(22)、力度旋钮(24)、速度旋钮(25)和液晶显示屏(26)安装在所述的底座(12)上表面中后部,其中:液晶显示屏(26)在底座(12)上表面中间位置,力度旋钮(24)、开关(21)、模式选择按钮(22)和速度旋钮(25) 从左至右分别安装在底座(12)上表面后部;所述的开关(21)、模式选择按钮(22)、力度旋钮(24)、速度旋钮(25)、液晶显示屏(26) 通过导线与仿进攻系统连接;
所述的仿进攻系统包括伸缩装置(31)、旋转装置(32)、仿劈拳装置(33)、仿直拳装置(34)、仿摆拳装置(35)、仿勾拳装置(36)、仿鞭腿装置(37)和仿蹬腿装置(38),其中:
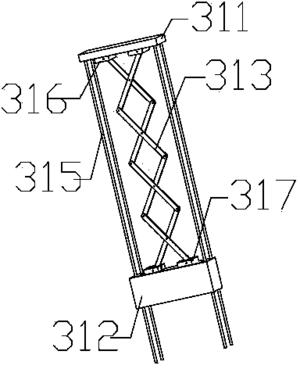
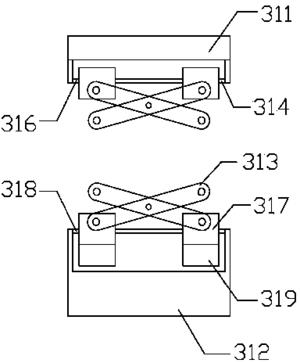
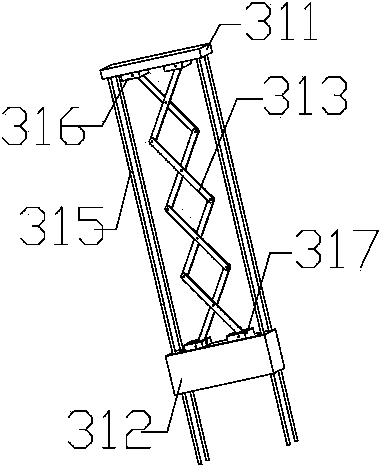
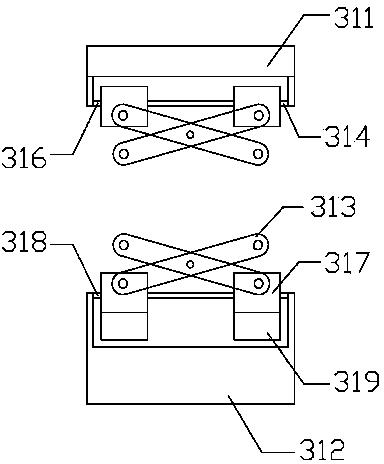
所述的伸缩装置(31)包括方板(311)、外壳(312)、连杆组(313)、滑轨A(314)、滑杆(315)、一号滑块(316)、二号滑块(317) 、滑轨B(318)和电磁铁(319);所述的方板(311)是长方体实心结构;所述的外壳(312)是前端开口的长方体空心结构;方板(311)和外壳(312)的前后平面相互平行设置;所述的一号滑块(316) 、二号滑块(317) 和电磁铁(319)的数量均为2个;所述的滑杆(315)的数量为4个;所述的方板(311)后表面固定安装有滑轨A(314),所述的2个一号滑块(316)滑动连接在滑轨A(314)上;所述的外壳(312)开口处固定安装有滑轨B(318),所述的2个二号滑块(317)滑动连接在滑轨B(318)上;所述的连杆组(313)由N对X形连杆相互铰接而成,结构可伸缩,X形连杆一端的2个端头铰接在2个一号滑块(316)上,另一端的2个端头铰接在2个二号滑块(317)上;所述的外壳(312)前表面在滑轨B(318)的左右两侧对称设置有各2个通孔,所述的四个滑杆(315)分2对对称穿过外壳(312)上的对称设置的各2个通孔后固定连接在方板(311)的后表面上;所述的2个电磁铁(319)在外壳(312)的内部分别固定安装在2个二号滑块(317)上,并通过导线与所述的控制系统相连接;所述的伸缩装置(31)有3个,分别与仿直拳装置(34)、仿勾拳装置(36)和仿蹬腿装置(38)相连接;
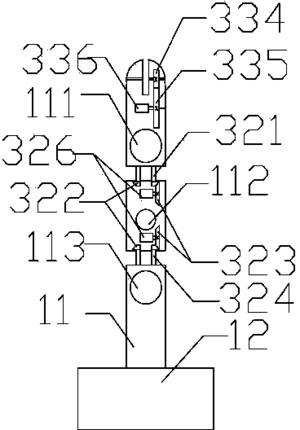
所述的旋转装置(32)包括旋转套圈、锥齿轮Ⅰ(322)、锥齿轮Ⅱ(323)和步进电机B(326);所述的旋转装置(32)有2个,设置在所述的圆柱体(11)内部,并在所述的通孔B(112)上下两侧对称设置;所述的2个旋转装置(32)中的2个旋转套圈分别镶嵌在所述的圆柱体(11)在3个圆形通孔之间开有的2个环形凹槽内;所述的锥齿轮Ⅰ(322)与旋转套圈固定连接;所述的2个旋转套圈分别为上旋转套圈(321)和下旋转套圈(324);所述的锥齿轮Ⅱ(323)与锥齿轮Ⅰ(322)相互啮合,且锥齿轮Ⅱ(323)与所述的步进电机(326)固定连接;所述的步进电机(326)通过导线与控制系统相连接;所述的2个旋转装置(32)通过上旋转套圈(321)、下旋转套圈(324)分别与仿摆拳装置(35) 、仿鞭腿装置(37)相连接;
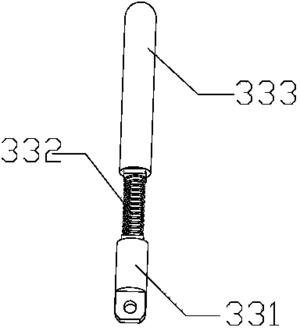
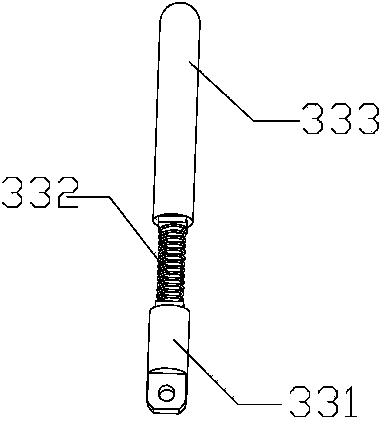
所述的仿劈拳装置(33)包括旋转杆(331)、弹簧A(332)、劈拳杆(333)、齿轮Ⅰ(334)、齿轮Ⅱ(335)和步进电机(336);所述的旋转杆(331)一端与劈拳杆(333)通过所述的弹簧A(332)相连接,另一端旋转连接在所述的圆柱体(11)最上端开有半圆形凹槽内;所述的齿轮Ⅰ(334)、齿轮Ⅱ(335)和步进电机(336)设置在圆柱体(11)内部空腔的上部:所述的齿轮Ⅰ(334)与旋转杆(331)在圆柱体(11)开有半圆形凹槽内的一端固定连接;所述的齿轮Ⅱ(335)与齿轮Ⅰ(334)相互啮合,且齿轮Ⅱ(335)与所述的步进电机(336)固定连接;所述的步进电机(336)通过导线与控制系统相连接;
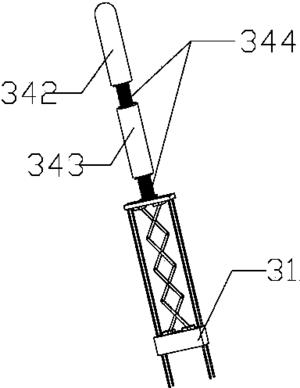
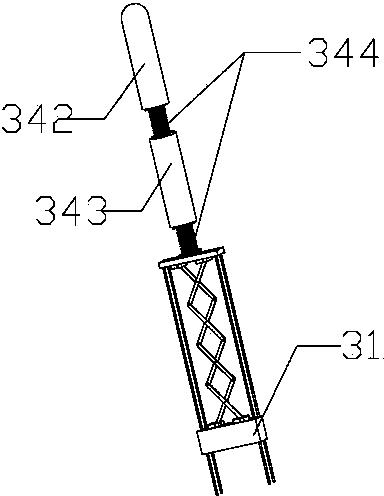
所述的仿直拳装置(34)包括直拳前杆(342)、直拳中杆(343)和弹簧B(344);所述的弹簧B (344)数量为2个;所述的直拳中杆(343)的一端通过其中一个弹簧B (344)与直拳前杆(342)相连接,另一端通过另外一个弹簧B(344) 与伸缩装置(31) 的方板(311)前表面相连接;伸缩装置(31)的外壳(311)固定安装在所述的支座A(131)上;所述的直拳前杆(342)穿透所述的圆柱体(11)上开有的通孔A(111);此处所述的伸缩装置(31)是指与仿直拳装置(34)相连接的伸缩装置(31);
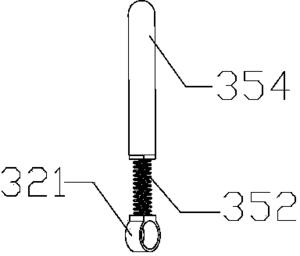
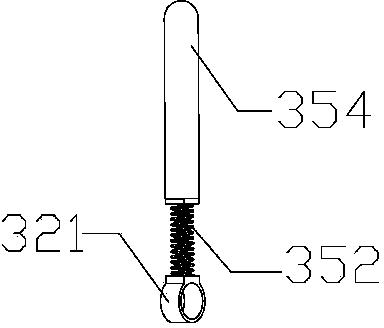
所述的仿摆拳装置(35)包括弹簧C(352)和摆拳杆(354);所述的弹簧C(352)一端与摆拳杆(354)连接,另一端与所述的旋转装置(32)的上旋转套圈(321)连接;
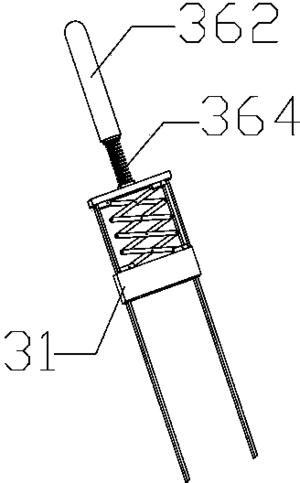
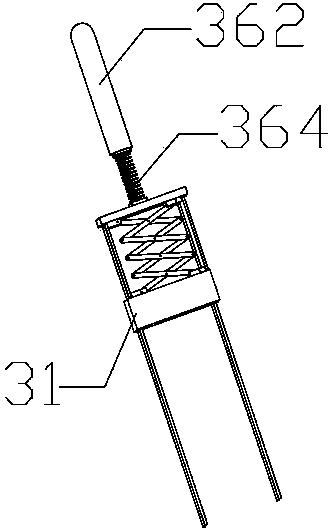
所述的仿勾拳装置(36)包括勾拳杆(362)和弹簧D(364);所述的弹簧D(364)一端与勾拳杆(362)相连接,另一端与伸缩装置(31)的方板(311)前表面相连接;伸缩装置(31)的外壳(311)固定安装在所述的支座B(132)上;所述的勾拳杆(362)穿透所述的圆柱体(11)上开有的通孔B(112); 此处所述的伸缩装置(31)是指与仿勾拳装置(36)相连接的伸缩装置(31);
所述的仿鞭腿装置(37) 包括弹簧E(372)和鞭腿杆(374);所述的弹簧E (372)一端与鞭拳杆(374)连接,另一端与所述的旋转装置(32)的下旋转套圈(324)连接;
所述的仿蹬腿装置(38)包括蹬腿前杆(382)、蹬腿中杆(383)和弹簧F(384);所述的弹簧F (384)数量为2个;所述的蹬腿中杆(383)的一端通过其中一个弹簧F (384)与蹬腿前杆(382)相连接,另一端通过另外一个弹簧F(384) 与伸缩装置(31) 的方板(311)前表面相连接;伸缩装置(31)的外壳(311)固定安装在所述的支座C(133)上;所述的蹬腿前杆(382)穿透所述的圆柱体(11)上开有的通孔C(113);此处所述的伸缩装置(31)是指与仿蹬腿装置(38)相连接的伸缩装置(31)。
2.根据权利要求1所述的一种具有主动进攻能力的调节式武术训练桩,其特征在于:所述的圆柱体(11)、劈拳杆(333)、直拳前杆(342)、直拳中杆(343)、摆拳杆(354)、勾拳杆(362)、鞭拳杆(374)、蹬腿前杆(382)和蹬腿中杆(383)的外表面均包裹有缓冲层。
3.根据权利要求1或2所述的一种具有主动进攻能力的调节式武术训练桩,其特征在于:所述的通孔B(112)是呈角度为60度的前孔朝上的斜孔;所述的连杆组(313)由4对X形连杆相互铰接而成。
4.根据权利要求1或2所述的一种具有主动进攻能力的调节式武术训练桩,其特征在于:所述的圆柱体(11)高度为2米;所述的旋转杆(331)长度为20厘米;所述的弹簧A(332)、 弹簧B(344)、 弹簧C(352)、 弹簧D(364) 、弹簧E(372) 和弹簧F(384)长度均为20厘米;所述的劈拳杆(333)长度为40厘米;所述的直拳前杆(342)长度为40厘米;所述的直拳中杆(343)长度为27厘米;所述的摆拳杆(354)长度为30厘米;所述的勾拳杆(362)长度为28厘米;所述的鞭腿杆(374)长度为1米;所述的蹬腿前杆(382)长度为50厘米;所述的蹬腿中杆(383)长度为50厘米。
5.根据权利要求4所述的一种具有主动进攻能力的调节式武术训练桩,其特征在于:所述的劈拳杆(331)、直拳前杆(342)、直拳中杆(343)、摆拳杆(354)和勾拳杆(362)直径为10厘米;所述的鞭腿杆(374)、蹬腿中杆(383)和蹬腿前杆(382)直径为15厘米。
6.一种根据权利要求1所述的具有主动进攻能力的调节式武术训练桩的训练方法,包括以下步骤:
(a)打开开关(21),通过模式选择按钮(22)选择武术训练桩的工作模式,通过力度旋钮(24)调节武术训练桩发力大小,通过速度旋钮(25)调节武术训练桩发力速度;
(b)武术训练桩自动进入10秒延时;
(c)使用者在武术训练桩前做好准备,等待武术训练桩开始工作;
(d)武术训练桩按照设定程序重复如下动作中的一项或不断以随机次序执行如下动作:
控制系统控制与仿直拳装置(34)相连接的伸缩装置(31)中的2个电磁铁(319)相互吸引,使连杆组(313)伸长,推动方板(311)向前运动,从而使直拳中杆(343)及直拳前杆(342)向前运动并攻击使用者,随后,2个电磁铁(319)相互排斥,使连杆组(313)缩短,拉动方板(311)向后运动,从而使直拳中杆(343)及直拳前杆(342)向后收回;
控制系统控制与仿勾拳装置(36) 相连接的伸缩装置(31)中的2个电磁铁(319)相互吸引,使连杆组(313)伸长,推动方板(311)向前运动,从而使勾拳杆(362)向前运动并攻击使用者,随后,2个电磁铁(319)相互排斥,使连杆组(313)缩短,拉动方板(311)向后运动,从而使勾拳杆(362)向后收回;
控制系统控制与仿蹬腿装置(38)相连接的伸缩装置(31)中的2个电磁铁(319)相互吸引,使连杆组(313)伸长,推动方板(311)向前运动,从而使蹬腿中杆(383)及蹬腿前杆(382)向前运动并攻击使用者,随后,2个电磁铁(319)相互排斥,使连杆组(313)缩短,拉动方板(311)向后运动,从而使蹬腿中杆(383)及蹬腿前杆(385)向后收回;
控制系统控制仿劈拳装置(33)内的步进电机A(336)转动,步进电机A(336)带动齿轮Ⅱ(335)转动,齿轮Ⅱ(335)带动齿轮Ⅰ(334)转动,齿轮Ⅰ(334)再带动旋转杆(331)及劈拳杆(333)转动并由上而下击打使用者,随后步进电机A(336)反向转动使仿劈拳装置(33)复位;
控制系统控制与仿摆拳装置(35)相连接的旋转装置(32)中的步进电机B(326)转动,步进电机B(326)带动锥齿轮Ⅱ(323)转动,锥齿轮Ⅱ(323)带动锥齿轮Ⅰ(322)转动,锥齿轮Ⅰ(322)再带动上旋转套圈(321)及摆拳杆(354)转动并击打使用者,随后步进电机B (326)反向转动使仿摆拳装置(35)复位;
控制系统控制与仿鞭腿装置(37)相连接的旋转装置(32)中的步进电机B (326)转动,步进电机B (326)带动锥齿轮Ⅱ(323)转动,锥齿轮Ⅱ(323)带动锥齿轮Ⅰ(322)转动,锥齿轮Ⅰ(322)再带动下旋转套圈(324)及鞭腿杆(374)转动并击打使用者,随后步进电机B (326)反向转动使仿鞭腿装置(37)复位;
(e)使用者躲避或阻拦武术训练桩的进攻并击打武术训练桩;
(f)使用者向后退出武术训练桩的攻击范围并绕到武术训练桩后方关闭开关(21)。
1.一种具有主动进攻能力的调节式武术训练桩,包括主体(1)和控制系统,其特征在于:还包括仿进攻系统;
所述的主体(1)包括圆柱体(11)、底座(12)和支座;所述的圆柱体(11)呈内部中空状,并垂直固定安装在底座(12)上表面前部;所述的支座有3个,分别为支座A(131)、支座B(132)和支座C(133),呈长方形板状结构,从上至下分别均匀垂直焊接在圆柱体(11)后侧;所述的圆柱体(11)从上至下还均匀开有3个圆形通孔,分别是通孔A(111)、通孔B(112)和通孔C(113),3个圆形通孔下边缘分别与所述的3个支座之间留有间隙;所述的圆柱体(11)在3个圆形通孔之间开有2个环形凹槽,圆柱体(11)最上端还开有半圆形凹槽;
所述的控制系统包括开关(21)、模式选择按钮(22)、力度旋钮(24)、速度旋钮(25)、液晶显示屏(26);所述的开关(21)、模式选择按钮(22)、力度旋钮(24)、速度旋钮(25)和液晶显示屏(26)安装在所述的底座(12)上表面中后部,其中:液晶显示屏(26)在底座(12)上表面中间位置,力度旋钮(24)、开关(21)、模式选择按钮(22)和速度旋钮(25) 从左至右分别安装在底座(12)上表面后部;所述的开关(21)、模式选择按钮(22)、力度旋钮(24)、速度旋钮(25)、液晶显示屏(26) 通过导线与仿进攻系统连接;
所述的仿进攻系统包括伸缩装置(31)、旋转装置(32)、仿劈拳装置(33)、仿直拳装置(34)、仿摆拳装置(35)、仿勾拳装置(36)、仿鞭腿装置(37)和仿蹬腿装置(38),其中:
所述的伸缩装置(31)包括方板(311)、外壳(312)、连杆组(313)、滑轨A(314)、滑杆(315)、一号滑块(316)、二号滑块(317) 、滑轨B(318)和电磁铁(319);所述的方板(311)是长方体实心结构;所述的外壳(312)是前端开口的长方体空心结构;方板(311)和外壳(312)的前后平面相互平行设置;所述的一号滑块(316) 、二号滑块(317) 和电磁铁(319)的数量均为2个;所述的滑杆(315)的数量为4个;所述的方板(311)后表面固定安装有滑轨A(314),所述的2个一号滑块(316)滑动连接在滑轨A(314)上;所述的外壳(312)开口处固定安装有滑轨B(318),所述的2个二号滑块(317)滑动连接在滑轨B(318)上;所述的连杆组(313)由N对X形连杆相互铰接而成,结构可伸缩,X形连杆一端的2个端头铰接在2个一号滑块(316)上,另一端的2个端头铰接在2个二号滑块(317)上;所述的外壳(312)前表面在滑轨B(318)的左右两侧对称设置有各2个通孔,所述的四个滑杆(315)分2对对称穿过外壳(312)上的对称设置的各2个通孔后固定连接在方板(311)的后表面上;所述的2个电磁铁(319)在外壳(312)的内部分别固定安装在2个二号滑块(317)上,并通过导线与所述的控制系统相连接;所述的伸缩装置(31)有3个,分别与仿直拳装置(34)、仿勾拳装置(36)和仿蹬腿装置(38)相连接;
所述的旋转装置(32)包括旋转套圈、锥齿轮Ⅰ(322)、锥齿轮Ⅱ(323)和步进电机B(326);所述的旋转装置(32)有2个,设置在所述的圆柱体(11)内部,并在所述的通孔B(112)上下两侧对称设置;所述的2个旋转装置(32)中的2个旋转套圈分别镶嵌在所述的圆柱体(11)在3个圆形通孔之间开有的2个环形凹槽内;所述的锥齿轮Ⅰ(322)与旋转套圈固定连接;所述的2个旋转套圈分别为上旋转套圈(321)和下旋转套圈(324);所述的锥齿轮Ⅱ(323)与锥齿轮Ⅰ(322)相互啮合,且锥齿轮Ⅱ(323)与所述的步进电机(326)固定连接;所述的步进电机(326)通过导线与控制系统相连接;所述的2个旋转装置(32)通过上旋转套圈(321)、下旋转套圈(324)分别与仿摆拳装置(35) 、仿鞭腿装置(37)相连接;
所述的仿劈拳装置(33)包括旋转杆(331)、弹簧A(332)、劈拳杆(333)、齿轮Ⅰ(334)、齿轮Ⅱ(335)和步进电机(336);所述的旋转杆(331)一端与劈拳杆(333)通过所述的弹簧A(332)相连接,另一端旋转连接在所述的圆柱体(11)最上端开有半圆形凹槽内;所述的齿轮Ⅰ(334)、齿轮Ⅱ(335)和步进电机(336)设置在圆柱体(11)内部空腔的上部:所述的齿轮Ⅰ(334)与旋转杆(331)在圆柱体(11)开有半圆形凹槽内的一端固定连接;所述的齿轮Ⅱ(335)与齿轮Ⅰ(334)相互啮合,且齿轮Ⅱ(335)与所述的步进电机(336)固定连接;所述的步进电机(336)通过导线与控制系统相连接;
所述的仿直拳装置(34)包括直拳前杆(342)、直拳中杆(343)和弹簧B(344);所述的弹簧B (344)数量为2个;所述的直拳中杆(343)的一端通过其中一个弹簧B (344)与直拳前杆(342)相连接,另一端通过另外一个弹簧B(344) 与伸缩装置(31) 的方板(311)前表面相连接;伸缩装置(31)的外壳(311)固定安装在所述的支座A(131)上;所述的直拳前杆(342)穿透所述的圆柱体(11)上开有的通孔A(111);此处所述的伸缩装置(31)是指与仿直拳装置(34)相连接的伸缩装置(31);
所述的仿摆拳装置(35)包括弹簧C(352)和摆拳杆(354);所述的弹簧C(352)一端与摆拳杆(354)连接,另一端与所述的旋转装置(32)的上旋转套圈(321)连接;
所述的仿勾拳装置(36)包括勾拳杆(362)和弹簧D(364);所述的弹簧D(364)一端与勾拳杆(362)相连接,另一端与伸缩装置(31)的方板(311)前表面相连接;伸缩装置(31)的外壳(311)固定安装在所述的支座B(132)上;所述的勾拳杆(362)穿透所述的圆柱体(11)上开有的通孔B(112); 此处所述的伸缩装置(31)是指与仿勾拳装置(36)相连接的伸缩装置(31);
所述的仿鞭腿装置(37) 包括弹簧E(372)和鞭腿杆(374);所述的弹簧E (372)一端与鞭拳杆(374)连接,另一端与所述的旋转装置(32)的下旋转套圈(324)连接;
所述的仿蹬腿装置(38)包括蹬腿前杆(382)、蹬腿中杆(383)和弹簧F(384);所述的弹簧F (384)数量为2个;所述的蹬腿中杆(383)的一端通过其中一个弹簧F (384)与蹬腿前杆(382)相连接,另一端通过另外一个弹簧F(384) 与伸缩装置(31) 的方板(311)前表面相连接;伸缩装置(31)的外壳(311)固定安装在所述的支座C(133)上;所述的蹬腿前杆(382)穿透所述的圆柱体(11)上开有的通孔C(113);此处所述的伸缩装置(31)是指与仿蹬腿装置(38)相连接的伸缩装置(31)。
2.根据权利要求1所述的一种具有主动进攻能力的调节式武术训练桩,其特征在于:所述的圆柱体(11)、劈拳杆(333)、直拳前杆(342)、直拳中杆(343)、摆拳杆(354)、勾拳杆(362)、鞭拳杆(374)、蹬腿前杆(382)和蹬腿中杆(383)的外表面均包裹有缓冲层。
3.根据权利要求1或2所述的一种具有主动进攻能力的调节式武术训练桩,其特征在于:所述的通孔B(112)是呈角度为60度的前孔朝上的斜孔;所述的连杆组(313)由4对X形连杆相互铰接而成。
4.根据权利要求1或2所述的一种具有主动进攻能力的调节式武术训练桩,其特征在于:所述的圆柱体(11)高度为2米;所述的旋转杆(331)长度为20厘米;所述的弹簧A(332)、 弹簧B(344)、 弹簧C(352)、 弹簧D(364) 、弹簧E(372) 和弹簧F(384)长度均为20厘米;所述的劈拳杆(333)长度为40厘米;所述的直拳前杆(342)长度为40厘米;所述的直拳中杆(343)长度为27厘米;所述的摆拳杆(354)长度为30厘米;所述的勾拳杆(362)长度为28厘米;所述的鞭腿杆(374)长度为1米;所述的蹬腿前杆(382)长度为50厘米;所述的蹬腿中杆(383)长度为50厘米。
5.根据权利要求4所述的一种具有主动进攻能力的调节式武术训练桩,其特征在于:所述的劈拳杆(331)、直拳前杆(342)、直拳中杆(343)、摆拳杆(354)和勾拳杆(362)直径为10厘米;所述的鞭腿杆(374)、蹬腿中杆(383)和蹬腿前杆(382)直径为15厘米。
6.一种根据权利要求1所述的具有主动进攻能力的调节式武术训练桩的训练方法,包括以下步骤:
(a)打开开关(21),通过模式选择按钮(22)选择武术训练桩的工作模式,通过力度旋钮(24)调节武术训练桩发力大小,通过速度旋钮(25)调节武术训练桩发力速度;
(b)武术训练桩自动进入10秒延时;
(c)使用者在武术训练桩前做好准备,等待武术训练桩开始工作;
(d)武术训练桩按照设定程序重复如下动作中的一项或不断以随机次序执行如下动作:
控制系统控制与仿直拳装置(34)相连接的伸缩装置(31)中的2个电磁铁(319)相互吸引,使连杆组(313)伸长,推动方板(311)向前运动,从而使直拳中杆(343)及直拳前杆(342)向前运动并攻击使用者,随后,2个电磁铁(319)相互排斥,使连杆组(313)缩短,拉动方板(311)向后运动,从而使直拳中杆(343)及直拳前杆(342)向后收回;
控制系统控制与仿勾拳装置(36) 相连接的伸缩装置(31)中的2个电磁铁(319)相互吸引,使连杆组(313)伸长,推动方板(311)向前运动,从而使勾拳杆(362)向前运动并攻击使用者,随后,2个电磁铁(319)相互排斥,使连杆组(313)缩短,拉动方板(311)向后运动,从而使勾拳杆(362)向后收回;
控制系统控制与仿蹬腿装置(38)相连接的伸缩装置(31)中的2个电磁铁(319)相互吸引,使连杆组(313)伸长,推动方板(311)向前运动,从而使蹬腿中杆(383)及蹬腿前杆(382)向前运动并攻击使用者,随后,2个电磁铁(319)相互排斥,使连杆组(313)缩短,拉动方板(311)向后运动,从而使蹬腿中杆(383)及蹬腿前杆(385)向后收回;
控制系统控制仿劈拳装置(33)内的步进电机A(336)转动,步进电机A(336)带动齿轮Ⅱ(335)转动,齿轮Ⅱ(335)带动齿轮Ⅰ(334)转动,齿轮Ⅰ(334)再带动旋转杆(331)及劈拳杆(333)转动并由上而下击打使用者,随后步进电机A(336)反向转动使仿劈拳装置(33)复位;
控制系统控制与仿摆拳装置(35)相连接的旋转装置(32)中的步进电机B(326)转动,步进电机B(326)带动锥齿轮Ⅱ(323)转动,锥齿轮Ⅱ(323)带动锥齿轮Ⅰ(322)转动,锥齿轮Ⅰ(322)再带动上旋转套圈(321)及摆拳杆(354)转动并击打使用者,随后步进电机B (326)反向转动使仿摆拳装置(35)复位;
控制系统控制与仿鞭腿装置(37)相连接的旋转装置(32)中的步进电机B (326)转动,步进电机B (326)带动锥齿轮Ⅱ(323)转动,锥齿轮Ⅱ(323)带动锥齿轮Ⅰ(322)转动,锥齿轮Ⅰ(322)再带动下旋转套圈(324)及鞭腿杆(374)转动并击打使用者,随后步进电机B (326)反向转动使仿鞭腿装置(37)复位;
(e)使用者躲避或阻拦武术训练桩的进攻并击打武术训练桩;
(f)使用者向后退出武术训练桩的攻击范围并绕到武术训练桩后方关闭开关(21)。
说明书
技术领域
本发明涉及体育训练器材领域,具体地说是一种具有主动进攻能力的调节式武术训练桩及其训练方法。
背景技术
武术学习者在训练时通常会用到训练桩,但现有的训练桩只能承受击打不能主动进攻,导致使用者无法全面的训练攻防能力。
中国专利申请号:201320390981.6,申请日:2013年07月03日,发明创造名称为:武术散打训练器,该申请案公开了一种武术散打训练器,由底座和假人组成,所述的底座为圆筒形,底座的周围侧壁上设有多个散热孔,底座内固定安装有电动机,电动机的旋转头露在底座的上端面之外;所述的假人包含假身、假肢和圆球,所述的假身为长方体形状,假身的下端面与所述电机的旋转头固定连接,旋转头设置于假身的下端面的中间位置,假身的下端面与底座的上端面平行设置,所述假肢有四根,四根假肢固定连接于假身四个侧面;所述圆球与假身的上端面固定连接。该申请案不足之处在于:由于训练器的进攻动作由假人的整体旋转形成,模拟的进攻动作种类单一、功能欠缺且与真实对抗动作差距过大;由于电机的转速不可调,武术散打训练器不能满足不同水平使用者的需求,适用范围受限。
发明内容
发明要解决的技术问题
针对现有技术中的武术散打训练器进攻动作种类单一、功能欠缺、与真实对抗动作差距过大、适用范围窄等问题,本发明提供了一种具有主动进攻能力的调节式武术训练桩及其训练方法。本发明的一种具有主动进攻能力的调节式武术训练桩进攻动作全面、逼真并能够满足不同水平学习者的训练需求,且训练方法能够按即定程序进行,方便学习人员直接应用。
技术方案
为达到上述目的,本发明提供的技术方案为:
一种具有主动进攻能力的调节式武术训练桩,包括主体和控制系统,还包括仿进攻系统;
所述的主体包括圆柱体、底座和支座;所述的圆柱体呈内部中空状,并垂直固定安装在底座上表面前部;所述的支座有3个,分别为支座A、支座B和支座C,呈长方形板状结构,从上至下分别均匀垂直焊接在圆柱体后侧;所述的圆柱体从上至下还均匀开有3个圆形通孔,分别是通孔A、通孔B和通孔C,3个圆形通孔下边缘分别与所述的3个支座之间留有间隙;所述的圆柱体在3个圆形通孔之间开有2个环形凹槽,圆柱体最上端还开有半圆形凹槽;
所述的控制系统包括开关、模式选择按钮、力度旋钮、速度旋钮、液晶显示屏;所述的开关、模式选择按钮、力度旋钮、速度旋钮和液晶显示屏安装在所述的底座上表面中后部,其中:液晶显示屏在底座上表面中间位置,力度旋钮、开关、模式选择按钮和速度旋钮从左至右分别安装在底座上表面后部;所述的开关、模式选择按钮、力度旋钮、速度旋钮、液晶显示屏通过导线与仿进攻系统连接;
所述的仿进攻系统包括伸缩装置、旋转装置、仿劈拳装置、仿直拳装置、仿摆拳装置、仿勾拳装置、仿鞭腿装置和仿蹬腿装置,其中:
所述的伸缩装置包括方板、外壳、连杆组、滑轨A、滑杆、一号滑块、二号滑块、滑轨B和电磁铁;所述的方板是长方体实心结构;所述的外壳是前端开口的长方体空心结构;方板和外壳的前后平面相互平行设置;所述的一号滑块、二号滑块和电磁铁的数量均为2个;所述的滑杆的数量为4个;所述的方板后表面固定安装有滑轨A,所述的2个一号滑块滑动连接在滑轨A上;所述的外壳开口处固定安装有滑轨B,所述的2个二号滑块滑动连接在滑轨B上;所述的连杆组由N对X形连杆相互铰接而成,结构可伸缩,X形连杆一端的2个端头铰接在2个一号滑块上,另一端的2个端头铰接在2个二号滑块上;所述的外壳前表面在滑轨B的左右两侧对称设置有各2个通孔,所述的四个滑杆分2对对称穿过外壳上的对称设置的各2个通孔后固定连接在方板的后表面上;所述的2个电磁铁在外壳的内部分别固定安装在2个二号滑块上,并通过导线与所述的控制系统相连接;所述的伸缩装置有3个,分别与仿直拳装置、仿勾拳装置和仿蹬腿装置相连接;
所述的旋转装置包括旋转套圈、锥齿轮Ⅰ、锥齿轮Ⅱ和步进电机B;所述的旋转装置有2个,设置在所述的圆柱体内部,并在所述的通孔B上下两侧对称设置;所述的2个旋转装置中的2个旋转套圈分别镶嵌在所述的圆柱体在3个圆形通孔之间开有的2个环形凹槽内;所述的锥齿轮Ⅰ与旋转套圈固定连接;所述的2个旋转套圈分别为上旋转套圈和下旋转套圈;所述的锥齿轮Ⅱ与锥齿轮Ⅰ相互啮合,且锥齿轮Ⅱ与所述的步进电机固定连接;所述的步进电机通过导线与控制系统相连接;所述的2个旋转装置通过上旋转套圈、下旋转套圈分别与仿摆拳装置、仿鞭腿装置相连接;
所述的仿劈拳装置包括旋转杆、弹簧A、劈拳杆、齿轮Ⅰ、齿轮Ⅱ和步进电机;所述的旋转杆一端与劈拳杆通过所述的弹簧A相连接,另一端旋转连接在所述的圆柱体最上端开有半圆形凹槽内;所述的齿轮Ⅰ、齿轮Ⅱ和步进电机设置在圆柱体内部空腔的上部:所述的齿轮Ⅰ与旋转杆在圆柱体开有半圆形凹槽内的一端固定连接;所述的齿轮Ⅱ与齿轮Ⅰ相互啮合,且齿轮Ⅱ与所述的步进电机固定连接;所述的步进电机通过导线与控制系统相连接;
所述的仿直拳装置包括直拳前杆、直拳中杆和弹簧B;所述的弹簧B数量为2个;所述的直拳中杆的一端通过其中一个弹簧B与直拳前杆相连接,另一端通过另外一个弹簧B 与伸缩装置的方板前表面相连接;伸缩装置的外壳固定安装在所述的支座A上;所述的直拳前杆穿透所述的圆柱体上开有的通孔A;此处所述的伸缩装置是指与仿直拳装置相连接的伸缩装置;
所述的仿摆拳装置包括弹簧C和摆拳杆;所述的弹簧C一端与摆拳杆连接,另一端与所述的旋转装置的上旋转套圈连接;
所述的仿勾拳装置包括勾拳杆和弹簧D;所述的弹簧D一端与勾拳杆相连接,另一端与伸缩装置的方板前表面相连接;伸缩装置的外壳固定安装在所述的支座B上;所述的勾拳杆穿透所述的圆柱体上开有的通孔B; 此处所述的伸缩装置是指与仿勾拳装置相连接的伸缩装置;
所述的仿鞭腿装置包括弹簧E和鞭腿杆;所述的弹簧E一端与鞭拳杆连接,另一端与所述的旋转装置的下旋转套圈连接;
所述的仿蹬腿装置包括蹬腿前杆、蹬腿中杆和弹簧F;所述的弹簧F数量为2个;所述的蹬腿中杆的一端通过其中一个弹簧F与蹬腿前杆相连接,另一端通过另外一个弹簧F与伸缩装置的方板前表面相连接;伸缩装置的外壳固定安装在所述的支座C上;所述的蹬腿前杆穿透所述的圆柱体上开有的通孔C;此处所述的伸缩装置是指与仿蹬腿装置相连接的伸缩装置。
优选地,所述的圆柱体、劈拳杆、直拳前杆、直拳中杆、摆拳杆、勾拳杆、鞭拳杆、蹬腿前杆和蹬腿中杆的外表面均包裹有缓冲层。
优选地,所述的通孔B是呈角度为60度的前孔朝上的斜孔;所述的连杆组由4对X形连杆相互铰接而成。
优选地,所述的圆柱体高度为2米;所述的旋转杆长度为20厘米;所述的弹簧A、 弹簧B、 弹簧C、 弹簧D 、弹簧E和弹簧F长度均为20厘米;所述的劈拳杆长度为40厘米;所述的直拳前杆长度为40厘米;所述的直拳中杆长度为27厘米;所述的摆拳杆长度为30厘米;所述的勾拳杆长度为28厘米;所述的鞭腿杆长度为1米;所述的蹬腿前杆长度为50厘米;所述的蹬腿中杆长度为50厘米。
优选地,所述的劈拳杆、直拳前杆、直拳中杆、摆拳杆和勾拳杆直径为10厘米;所述的鞭腿杆、蹬腿中杆和蹬腿前杆直径为15厘米。
一种具有主动进攻能力的调节式武术训练桩的训练方法,包括以下步骤:
(a)打开开关,通过模式选择按钮选择武术训练桩的工作模式,通过力度旋钮调节武术训练桩发力大小,通过速度旋钮调节武术训练桩发力速度;
(b)武术训练桩自动进入10秒延时;
(c)使用者在武术训练桩前做好准备,等待武术训练桩开始工作;
(d)武术训练桩按照设定程序重复如下动作中的一项或不断以随机次序执行如下动作:
控制系统控制与仿直拳装置相连接的伸缩装置中的2个电磁铁相互吸引,使连杆组伸长,推动方板向前运动,从而使直拳中杆及直拳前杆向前运动并攻击使用者,随后,2个电磁铁相互排斥,使连杆组缩短,拉动方板向后运动,从而使直拳中杆及直拳前杆向后收回;
控制系统控制与仿勾拳装置相连接的伸缩装置中的2个电磁铁相互吸引,使连杆组伸长,推动方板向前运动,从而使勾拳杆向前运动并攻击使用者,随后,2个电磁铁相互排斥,使连杆组缩短,拉动方板向后运动,从而使勾拳杆向后收回;
控制系统控制与仿蹬腿装置相连接的伸缩装置中的2个电磁铁相互吸引,使连杆组伸长,推动方板向前运动,从而使蹬腿中杆及蹬腿前杆向前运动并攻击使用者,随后,2个电磁铁相互排斥,使连杆组缩短,拉动方板向后运动,从而使蹬腿中杆及蹬腿前杆向后收回;
控制系统控制仿劈拳装置内的步进电机A转动,步进电机A带动齿轮Ⅱ转动,齿轮Ⅱ带动齿轮Ⅰ转动,齿轮Ⅰ再带动旋转杆及劈拳杆转动并由上而下击打使用者,随后步进电机A反向转动使仿劈拳装置复位;
控制系统控制与仿摆拳装置相连接的旋转装置中的步进电机B转动,步进电机B带动锥齿轮Ⅱ转动,锥齿轮Ⅱ带动锥齿轮Ⅰ转动,锥齿轮Ⅰ再带动上旋转套圈及摆拳杆转动并击打使用者,随后步进电机B反向转动使仿摆拳装置复位;
控制系统控制与仿鞭腿装置相连接的旋转装置中的步进电机B转动,步进电机B带动锥齿轮Ⅱ转动,锥齿轮Ⅱ带动锥齿轮Ⅰ转动,锥齿轮Ⅰ再带动下旋转套圈及鞭腿杆转动并击打使用者,随后步进电机B反向转动使仿鞭腿装置复位;
(e)使用者躲避或阻拦武术训练桩的进攻并击打武术训练桩;
(f)使用者向后退出武术训练桩的攻击范围并绕到武术训练桩后方关闭开关。
有益效果
采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:
(1)本发明的一种具有主动进攻能力的调节式武术训练桩,伸缩装置的原理为:2个电磁铁相互吸引,使连杆组伸长,推动方板向前运动,从而使勾拳杆向前运动并攻击使用者,随后,2个电磁铁相互排斥,使连杆组缩短,拉动方板向后运动,从而使勾拳杆向后收回,使得伸缩装置比采用齿轮齿条机构使用寿命更长;比采用液压机构成本更低;比采用电动推杆机构伸缩速度更快且提供了更贴近于真实的进攻动作。
(2)本发明的一种具有主动进攻能力的调节式武术训练桩,所述的仿劈拳装置、仿直拳装置、仿摆拳装置、仿勾拳装置、仿蹬腿装置和仿鞭腿装置的内部均使用了弹簧,防止训练桩击伤使用者或使用者用力过猛击伤训练桩,使得训练桩更加安全且使用寿命更长。
(3)本发明的一种具有主动进攻能力的调节式武术训练桩,根据武术、散打、截拳道、跆拳道等常见技术的常用进攻动作,设置了仿劈拳装置、仿直拳装置、仿摆拳装置、仿勾拳装置、仿蹬腿装置和仿鞭腿装置,使得训练桩进攻动作全面、逼真,可以提供更贴近于真实的进攻动作。
(4)本发明的一种具有主动进攻能力的调节式武术训练桩,可以通过力度旋钮、速度旋钮调节训练桩的攻击力度及速度,使得训练桩可以满足不同水平使用者的需求,适用范围广。
(5)本发明的一种具有主动进攻能力的调节式武术训练桩,可以通过模式选择按钮选择工作模式,训练桩可以根据选择的模式不断重复劈拳或直拳或摆拳或勾拳或蹬腿或鞭腿,使得使用者可以通过不断的重复某一个攻防动作来加深领悟;训练桩也可以根据选择的模式不断以随机次序执行劈拳、直拳、摆拳、勾拳、蹬腿和鞭腿来训练综合的攻防能力,功能全面。
(6)本发明的一种具有主动进攻能力的调节式武术训练桩,所述的圆柱体高度为2米;所述的旋转杆长度为20厘米;所述的弹簧A、 弹簧B、 弹簧C、 弹簧D 、弹簧E和弹簧F长度均为20厘米;所述的劈拳杆长度为40厘米;所述的直拳前杆长度为40厘米;所述的直拳中杆长度为27厘米;所述的摆拳杆长度为30厘米;所述的勾拳杆长度为28厘米;所述的鞭腿杆长度为1米;所述的蹬腿前杆长度为50厘米;所述的蹬腿中杆长度为50厘米;
所述的劈拳杆、直拳前杆、直拳中杆、摆拳杆和勾拳杆直径为10厘米;所述的鞭腿杆、蹬腿中杆和蹬腿前杆直径为15厘米,贴近于真实的人体比例及进攻高度,使得训练桩进攻动作全面、逼真,可以提供更贴近于真实的进攻动作。
(7)本发明的一种具有主动进攻能力的调节式武术训练桩,所述的底座上安装有液晶显示屏显示使用者选择的工作模式及攻击速度和力度,方便使用者的使用。
(8)本发明一种具有主动进攻能力的调节式武术训练桩,结构设计合理,便于推广使用。
附图说明
图1是本发明的一种具有主动进攻能力的调节式武术训练桩结构示意图;
图2是本发明的一种具有主动进攻能力的调节式武术训练桩主体和控制系统外部结构示意图;
图3是本发明的一种具有主动进攻能力的调节式武术训练桩主体内部结构示意图;
图4是本发明的一种具有主动进攻能力的调节式武术训练桩伸缩装置放大结构示意图;
图5是本发明的一种具有主动进攻能力的调节式武术训练桩伸缩装置图4方板后端和外壳内部的放大结构示意图;
图6是本发明的一种具有主动进攻能力的调节式武术训练桩仿劈拳装置结构示意图;
图7是本发明的一种具有主动进攻能力的调节式武术训练桩仿直拳装置结构示意图;
图8是本发明的一种具有主动进攻能力的调节式武术训练桩仿摆拳装置结构示意图;
图9是本发明的一种具有主动进攻能力的调节式武术训练桩仿勾拳装置结构示意图;
图10是本发明的一种具有主动进攻能力的调节式武术训练桩仿鞭腿装置结构示意图;
图11是本发明的一种具有主动进攻能力的调节式武术训练桩仿蹬腿装置结构示意图;
图12是本发明的一种具有主动进攻能力的调节式武术训练桩控制系统结构示意图。
示意图中的标号说明:1.主体;11.圆柱体;111.通孔A;112.通孔B;113.通孔C;12.底座;131.支座A;132.支座B;133.支座C;21.开关;22.模式选择按钮;24.力度旋钮;25.速度旋钮;26.液晶显示屏;31.伸缩装置;311.方板;312.外壳;313.连杆组;314.滑轨A;315.滑杆;316.一号滑块;317.二号滑块;318.滑轨B;319.电磁铁;32.旋转装置;321.上旋转套圈;322. 锥齿轮Ⅰ;323. 锥齿轮Ⅱ;324.下旋转套圈;326.步进电机B;33.仿劈拳装置;331.旋转杆;332.弹簧A;333.劈拳杆;334. 齿轮Ⅰ;335. 齿轮Ⅱ;336.步进电机;34.仿直拳装置;342.直拳前杆;343.直拳中杆;344.弹簧B;35.仿摆拳装置;352.弹簧C;354.摆拳杆;36.仿勾拳装置;362.勾拳杆;364弹簧D;37.仿鞭腿装置;372.弹簧E;374.鞭腿杆;38.仿蹬腿装置;382.蹬腿前杆;383.蹬腿中杆;384.弹簧F。
具体实施方式
为进一步了解本发明的内容,结合附图对本发明作详细描述。
实施例1
如图1和图2所示:本实施例的一种具有主动进攻能力的调节式武术训练桩,包括主体1和控制系统,还包括仿进攻系统;
如图2所示:所述的主体1包括圆柱体11、底座12和支座;所述的圆柱体11呈内部中空状,并垂直固定安装在底座12上表面前部;所述的支座有3个,分别为支座A131、支座B132和支座C133,呈长方形板状结构,从上至下分别均匀垂直焊接在圆柱体11后侧;所述的圆柱体11从上至下还均匀开有3个圆形通孔,分别是通孔A111、通孔B112和通孔C113,3个圆形通孔下边缘分别与所述的3个支座之间留有间隙;所述的圆柱体11在3个圆形通孔之间开有2个环形凹槽,圆柱体11最上端还开有半圆形凹槽;
如图12所示:所述的控制系统包括开关21、模式选择按钮22、力度旋钮24、速度旋钮25、液晶显示屏26;所述的开关21、模式选择按钮22、力度旋钮24、速度旋钮25和液晶显示屏26安装在所述的底座12上表面中后部,其中:液晶显示屏26在底座12上表面中间位置,力度旋钮24、开关21、模式选择按钮22和速度旋钮25 从左至右分别安装在底座12上表面后部;所述的开关21、模式选择按钮22、力度旋钮24、速度旋钮25、液晶显示屏26 通过导线与仿进攻系统连接;
如图1所示:所述的仿进攻系统包括伸缩装置31、旋转装置32、仿劈拳装置33、仿直拳装置34、仿摆拳装置35、仿勾拳装置36、仿鞭腿装置37和仿蹬腿装置38,其中:
如图4和图5所示:所述的伸缩装置31包括方板311、外壳312、连杆组313、滑轨A314、滑杆315、一号滑块316、二号滑块317 、滑轨B318和电磁铁319;所述的方板311是长方体实心结构;所述的外壳312是前端开口的长方体空心结构;方板311和外壳312的前后平面相互平行设置;所述的一号滑块316 、二号滑块317 和电磁铁319的数量均为2个;所述的滑杆315的数量为4个;所述的方板311后表面固定安装有滑轨A314,所述的2个一号滑块316滑动连接在滑轨A314上;所述的外壳312开口处固定安装有滑轨B318,所述的2个二号滑块317滑动连接在滑轨B318上;所述的连杆组313由N对X形连杆相互铰接而成,结构可伸缩,X形连杆一端的2个端头铰接在2个一号滑块316上,另一端的2个端头铰接在2个二号滑块317上;所述的外壳312前表面在滑轨B318的左右两侧对称设置有各2个通孔,所述的四个滑杆315分2对对称穿过外壳312上的对称设置的各2个通孔后固定连接在方板311的后表面上;所述的2个电磁铁319在外壳312的内部分别固定安装在2个二号滑块317上,并通过导线与所述的控制系统相连接;所述的伸缩装置31有3个,分别与仿直拳装置34、仿勾拳装置36和仿蹬腿装置38相连接;伸缩装置31用于为仿直拳装置34、仿勾拳装置36和仿蹬腿装置38提供动力;
如图3所示:所述的旋转装置32包括旋转套圈、锥齿轮Ⅰ322、锥齿轮Ⅱ323和步进电机B326;所述的旋转装置32有2个,设置在所述的圆柱体11内部,并在所述的通孔B112上下两侧对称设置;所述的2个旋转装置32中的2个旋转套圈分别镶嵌在所述的圆柱体11在3个圆形通孔之间开有的2个环形凹槽内;所述的锥齿轮Ⅰ322与旋转套圈固定连接;所述的2个旋转套圈分别为上旋转套圈321和下旋转套圈324;所述的锥齿轮Ⅱ323与锥齿轮Ⅰ322相互啮合,且锥齿轮Ⅱ323与所述的步进电机326固定连接;所述的步进电机326通过导线与控制系统相连接;所述的2个旋转装置32通过上旋转套圈321、下旋转套圈324分别与仿摆拳装置35 、仿鞭腿装置37相连接;旋转装置32用于为仿摆拳装置35 、仿鞭腿装置37提供动力;
如图6所示:所述的仿劈拳装置33包括旋转杆331、弹簧A332、劈拳杆333、齿轮Ⅰ334、齿轮Ⅱ335和步进电机336;所述的旋转杆331一端与劈拳杆333通过所述的弹簧A332相连接,另一端旋转连接在所述的圆柱体11最上端开有半圆形凹槽内;所述的齿轮Ⅰ334、齿轮Ⅱ335和步进电机336设置在圆柱体11内部空腔的上部:所述的齿轮Ⅰ334与旋转杆331在圆柱体11开有半圆形凹槽内的一端固定连接;所述的齿轮Ⅱ335与齿轮Ⅰ334相互啮合,且齿轮Ⅱ335与所述的步进电机336固定连接;所述的步进电机336通过导线与控制系统相连接;仿劈拳装置33用于模拟真实的劈拳动作;
如图7所示:所述的仿直拳装置34包括直拳前杆342、直拳中杆343和弹簧B344;所述的弹簧B 344数量为2个;所述的直拳中杆343的一端通过其中一个弹簧B 344与直拳前杆342相连接,另一端通过另外一个弹簧B344 与伸缩装置31 的方板311前表面相连接;伸缩装置31的外壳311固定安装在所述的支座A131上;所述的直拳前杆342穿透所述的圆柱体11上开有的通孔A111;此处所述的伸缩装置31是指与仿直拳装置34相连接的伸缩装置31;仿直拳装置34用于模拟真实的直拳动作;
如图8所示:所述的仿摆拳装置35包括弹簧C352和摆拳杆354;所述的弹簧C352一端与摆拳杆354连接,另一端与所述的旋转装置32的上旋转套圈321连接;仿摆拳装置35用于模拟真实的摆拳动作;
如图9所示:所述的仿勾拳装置36包括勾拳杆362和弹簧D364;所述的弹簧D364一端与勾拳杆362相连接,另一端与伸缩装置31的方板311前表面相连接;伸缩装置31的外壳311固定安装在所述的支座B132上;所述的勾拳杆362穿透所述的圆柱体11上开有的通孔B112; 此处所述的伸缩装置31是指与仿勾拳装置36相连接的伸缩装置31;仿勾拳装置36用于模拟真实的勾拳动作;
如图10所示:所述的仿鞭腿装置37 包括弹簧E372和鞭腿杆374;所述的弹簧E 372一端与鞭拳杆374连接,另一端与所述的旋转装置32的下旋转套圈324连接;仿鞭腿装置37用于模拟真实的鞭腿动作;
如图11所示:所述的仿蹬腿装置38包括蹬腿前杆382、蹬腿中杆383和弹簧F384;所述的弹簧F 384数量为2个;所述的蹬腿中杆383的一端通过其中一个弹簧F 384与蹬腿前杆382相连接,另一端通过另外一个弹簧F384 与伸缩装置31 的方板311前表面相连接;伸缩装置31的外壳311固定安装在所述的支座C133上;所述的蹬腿前杆382穿透所述的圆柱体11上开有的通孔C113;此处所述的伸缩装置31是指与仿蹬腿装置38相连接的伸缩装置31;仿蹬腿装置38用于模仿真实的蹬腿动作;在本实施例中,所述的圆柱体11、劈拳杆333、直拳前杆342、直拳中杆343、摆拳杆354、勾拳杆362、鞭拳杆374、蹬腿前杆382和蹬腿中杆383的外表面均包裹有缓冲层;所述的通孔B112是呈角度为60度的前孔朝上的斜孔;所述的连杆组313由4对X形连杆相互铰接而成;所述的圆柱体11高度为2米;所述的旋转杆331长度为20厘米;所述的弹簧A332、 弹簧B344、 弹簧C352、 弹簧D364 、弹簧E372 和弹簧F384长度均为20厘米;所述的劈拳杆333长度为40厘米;所述的直拳前杆342长度为40厘米;所述的直拳中杆343长度为27厘米;所述的摆拳杆354长度为30厘米;所述的勾拳杆362长度为28厘米;所述的鞭腿杆374长度为1米;所述的蹬腿前杆382长度为50厘米;所述的蹬腿中杆383长度为50厘米;所述的劈拳杆331、直拳前杆342、直拳中杆343、摆拳杆354和勾拳杆362直径为10厘米;所述的鞭腿杆374、蹬腿中杆383和蹬腿前杆382直径为15厘米。
本实施例的一种具有主动进攻能力的调节式武术训练桩的训练方法,包括以下步骤:
(a)打开开关21,通过模式选择按钮22选择武术训练桩的工作模式,通过力度旋钮24调节武术训练桩发力大小,通过速度旋钮25调节武术训练桩发力速度;
(b)武术训练桩自动进入10秒延时;
(c)使用者在武术训练桩前做好准备,等待武术训练桩开始工作;
(d)武术训练桩按照设定程序重复如下动作中的一项或不断以随机次序执行如下动作:
控制系统控制与仿直拳装置34相连接的伸缩装置31中的2个电磁铁319相互吸引,使连杆组313伸长,推动方板311向前运动,从而使直拳中杆343及直拳前杆342向前运动并攻击使用者,随后,2个电磁铁319相互排斥,使连杆组313缩短,拉动方板311向后运动,从而使直拳中杆343及直拳前杆342向后收回;
控制系统控制与仿勾拳装置36 相连接的伸缩装置31中的2个电磁铁319相互吸引,使连杆组313伸长,推动方板311向前运动,从而使勾拳杆362向前运动并攻击使用者,随后,2个电磁铁319相互排斥,使连杆组313缩短,拉动方板311向后运动,从而使勾拳杆362向后收回;
控制系统控制与仿蹬腿装置38相连接的伸缩装置31中的2个电磁铁319相互吸引,使连杆组313伸长,推动方板311向前运动,从而使蹬腿中杆383及蹬腿前杆382向前运动并攻击使用者,随后,2个电磁铁319相互排斥,使连杆组313缩短,拉动方板311向后运动,从而使蹬腿中杆383及蹬腿前杆385向后收回;
控制系统控制仿劈拳装置33内的步进电机A336转动,步进电机A336带动齿轮Ⅱ335转动,齿轮Ⅱ335带动齿轮Ⅰ334转动,齿轮Ⅰ334再带动旋转杆331及劈拳杆333转动并由上而下击打使用者,随后步进电机A336反向转动使仿劈拳装置33复位;
控制系统控制与仿摆拳装置35相连接的旋转装置32中的步进电机B326转动,步进电机B326带动锥齿轮Ⅱ323转动,锥齿轮Ⅱ323带动锥齿轮Ⅰ322转动,锥齿轮Ⅰ322再带动上旋转套圈321及摆拳杆354转动并击打使用者,随后步进电机B 326反向转动使仿摆拳装置35复位;
控制系统控制与仿鞭腿装置37相连接的旋转装置32中的步进电机B 326转动,步进电机B 326带动锥齿轮Ⅱ323转动,锥齿轮Ⅱ323带动锥齿轮Ⅰ322转动,锥齿轮Ⅰ322再带动下旋转套圈324及鞭腿杆374转动并击打使用者,随后步进电机B 326反向转动使仿鞭腿装置37复位;
(e)使用者躲避或阻拦武术训练桩的进攻并击打武术训练桩;
(f)使用者向后退出武术训练桩的攻击范围并绕到武术训练桩后方关闭开关21。
以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
价值度评估
技术价值
经济价值
法律价值
0 0 055.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:55.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间10 年】专利权的维持时间越长,其价值对于权利人而言越高。 尤其重要是,该专利 【权利转移1 次】、 都从侧面反应出该专利的技术、经济和法律价值。
技术价值 31.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
21 个月独立权利要求数量
0 个从属权利要求数量
0 个说明书页数
8 页实施例个数
0 个发明人数量
4 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
1 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 8.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
个人许可备案
0 次权利质押
0 次权利转移
1 个海关备案
否法律价值 16.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
10法律状态
无权-未缴年费







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...