

【中国发明,中国发明授权】一种利用水下机器人推进电机传送信息的装置及方法
有权-审定授权 中国
- 申请号:
- CN201910989523.6
- 专利权人:
- 江苏科技大学
- 授权公告日/公开日:
- 2021.07.09
- 专利有效期:
- 2019.10.17-2039.10.17
- 技术分类:
- H02:发电、变电或配电
- 转化方式:
- 转让
- 价值度指数:
-
- 59.0分
- 价格:
- ¥15000.00
发布人
深圳龙图腾科技成果转化有限公司
联系人丁工
-

- 18156017870
-

- 2850394575@qq.com
-

- 2850394575
-

- 18156017870
-

- 合肥市高新区创新产业园二期J2区18楼
- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201910989523.6
- 申请日
- 20191017
- 公开/公告号
- CN110572110A
- 公开/公告日
- 20191213
- 申请/专利权人
- [江苏科技大学]
- 发明/设计人
- [苗奎星, 魏海峰, 王浩陈, 李垣江, 张懿]
- 主分类号
- H02P27/08
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 江苏(32)
- 颁证日
- G06T1/00
- 代理人
- [杭行]
摘要
本发明公开了一种利用水下机器人推进电机传送信息的装置及方法,包括驱动模块、无刷直流电机的三相定子绕组、控制器,驱动模块与无刷直流电机的三相定子绕组相连;控制器的6个IO接口分别和驱动模块的6个栅极输入相连,用于电机的正常转动;同时IO接口也可在PWM无效时间内发送脉冲,改变电机转子瞬时的受力情况,用于电机相对于初始位置振动。其中使用方法包括:通过调节脉冲循环频率,可设置电机为低频振动模式与高频振动模式,用于不同场景和信息量的需求中。通过电机振动时间长短,实现所述摩尔斯信号的基本信号;通过延时控制,实现所述摩尔斯信号的时间间隔;令该摩尔斯信号按照所述摩尔斯编码表编码,因此起到了信息传输的效果。
法律状态
| 法律状态公告日 | 20230704 |
| 法律状态 | 专利申请权、专利权的转移 |
| 法律状态信息 | 专利权的转移 IPC(主分类):H02P 27/08 专利号:ZL2019109895236 登记生效日:20230625 变更事项:专利权人 变更前权利人:江苏科技大学 变更后权利人:深圳龙图腾科技成果转化有限公司 变更事项:地址 变更前权利人:212003 江苏省镇江市梦溪路2号 变更后权利人:518000 广东省深圳市罗湖区笋岗街道笋岗东路3002号万通大厦22层2202室 |
| 法律状态公告日 | 20210709 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
| 法律状态公告日 | 20200107 |
| 法律状态 | 实质审查的生效 |
| 法律状态信息 | 实质审查的生效 IPC(主分类):H02P 27/08 专利申请号:2019109895236 申请日:20191017 |
| 法律状态公告日 | 20191213 |
| 法律状态 | 公开 |
| 法律状态信息 | 公开 |
| 事务数据公告日 | 20230704 |
| 事务数据类型 | 专利申请权、专利权的转移 |
| 转让详情 | 专利权的转移 IPC(主分类):H02P 27/08 专利号:ZL2019109895236 登记生效日:20230625 变更事项:专利权人 变更前权利人:江苏科技大学 变更后权利人:深圳龙图腾科技成果转化有限公司 变更事项:地址 变更前权利人:212003 江苏省镇江市梦溪路2号 变更后权利人:518000 广东省深圳市罗湖区笋岗街道笋岗东路3002号万通大厦22层2202室 |
权利要求
权利要求数量(5)
独立权利要求数量(2)
1.一种利用水下机器人推进电机传送信息的装置,其特征在于,包括驱动模块、无刷直流电机的三相定子绕组、控制器,其中:所述驱动模块与无刷直流电机的三相定子绕组相连,用于驱动电机旋转、振动;所述控制器的6个IO接口分别和驱动模块的6个栅极输入相连,可发送PWM给6个MOS管的栅极,用于电机的正常转动。
2.如权利要求1所述的利用水下机器人推进电机传送信息的装置,其特征在于,所述驱动模块包括直流电源VDC、MOS管S1、MOS管S2、MOS管S3、MOS管S4、MOS管S5、MOS管S6、二极管VD1、二极管VD2、二极管VD3、二极管VD4、二极管VD5、二极管VD6;所述直流电源VDC的正极分别与MOS管S1的漏极、MOS管S3的漏极、MOS管S5的漏极、二极管VD1的阴极、二极管VD3的阴极、二极管VD5的阴极相连;所述直流电源的负极分别和所述MOS管S4的源极、MOS管S6的源极、MOS管S2的源极、二极管VD4的阳极、二极管VD6的阳极、二极管VD2的阳极相连;所述MOS管S1的源极、所述MOS管S4的漏极和无刷直流电机的A相相连,所述MOS管S1的源极和所述MOS管S4的漏极相连;所述MOS管S3的源极、所述MOS管S6的漏极和无刷直流电机的B相相连,所述MOS管S3的源极和所述MOS管S6的漏极相连;所述MOS管S5的源极、所述MOS管S2的漏极和无刷直流电机的C相相连,所述MOS管S5的源极和所述MOS管S2的漏极相连。
3.如权利要求2所述的利用水下机器人推进电机传送信息的装置,其特征在于,所述控制器包括控制器的IO接口P1、IO接口P2、IO接口P3、IO接口P4、IO接口P5、IO接口P6;所述MOS管S1的栅极和所述控制器的IO接口P1相连;所述MOS管S2的栅极和所述控制器的IO接口P2相连;所述MOS管S3的栅极和所述控制器的IO接口P3相连;所述MOS管S4的栅极和所述控制器的IO接口P4相连;所述MOS管S5的栅极和所述控制器的IO接口P5相连;所述MOS管S6的栅极和所述控制器的IO接口P6相连。
4.一种利用水下机器人推进电机传送信息方法,使用如权利要求3所述的利用水下机器人推进电机传送信息的装置,其特征在于,包括以下步骤:步骤一:设置控制器IO接口的脉冲模式与脉冲周期;步骤二:在电机工作空余区间内通过控制器的IO接口发送脉冲,使电机的转子在平衡位置附近振动,脉冲的延迟时间固定,脉冲的循环频率F的增减变化,使得电机产生时间长短不同的振动与振动间隔;步骤三:在控制代码中预存摩尔斯编码表每个字符所对应的F参数,在需要输出相应字符时,控制器读取预存信息进行电机振动控制;其中,所发脉冲循环频率F与电机振动频率D如下公式计算得到:D=F/8000。
5.根据权利要求4所述的利用水下机器人推进电机传送信息方法,其特征在于,在上述步骤中,当脉冲循环频率降低时,电机的振动频率变低,设置电机为低频振动模式,用于传输距离较远信息量较少信号;当脉冲循环频率升高时,电机的振动频率变高,设置为高频振动模式,用于近距离传输信息量较大的信号。
1.一种利用水下机器人推进电机传送信息的装置,其特征在于,包括驱动模块、无刷直流电机的三相定子绕组、控制器,其中:所述驱动模块与无刷直流电机的三相定子绕组相连,用于驱动电机旋转、振动;所述控制器的6个IO接口分别和驱动模块的6个栅极输入相连,可发送PWM给6个MOS管的栅极,用于电机的正常转动。
2.如权利要求1所述的利用水下机器人推进电机传送信息的装置,其特征在于,所述驱动模块包括直流电源VDC、MOS管S1、MOS管S2、MOS管S3、MOS管S4、MOS管S5、MOS管S6、二极管VD1、二极管VD2、二极管VD3、二极管VD4、二极管VD5、二极管VD6;所述直流电源VDC的正极分别与MOS管S1的漏极、MOS管S3的漏极、MOS管S5的漏极、二极管VD1的阴极、二极管VD3的阴极、二极管VD5的阴极相连;所述直流电源的负极分别和所述MOS管S4的源极、MOS管S6的源极、MOS管S2的源极、二极管VD4的阳极、二极管VD6的阳极、二极管VD2的阳极相连;所述MOS管S1的源极、所述MOS管S4的漏极和无刷直流电机的A相相连,所述MOS管S1的源极和所述MOS管S4的漏极相连;所述MOS管S3的源极、所述MOS管S6的漏极和无刷直流电机的B相相连,所述MOS管S3的源极和所述MOS管S6的漏极相连;所述MOS管S5的源极、所述MOS管S2的漏极和无刷直流电机的C相相连,所述MOS管S5的源极和所述MOS管S2的漏极相连。
3.如权利要求2所述的利用水下机器人推进电机传送信息的装置,其特征在于,所述控制器包括控制器的IO接口P1、IO接口P2、IO接口P3、IO接口P4、IO接口P5、IO接口P6;所述MOS管S1的栅极和所述控制器的IO接口P1相连;所述MOS管S2的栅极和所述控制器的IO接口P2相连;所述MOS管S3的栅极和所述控制器的IO接口P3相连;所述MOS管S4的栅极和所述控制器的IO接口P4相连;所述MOS管S5的栅极和所述控制器的IO接口P5相连;所述MOS管S6的栅极和所述控制器的IO接口P6相连。
4.一种利用水下机器人推进电机传送信息方法,使用如权利要求3所述的利用水下机器人推进电机传送信息的装置,其特征在于,包括以下步骤:步骤一:设置控制器IO接口的脉冲模式与脉冲周期;步骤二:在电机工作空余区间内通过控制器的IO接口发送脉冲,使电机的转子在平衡位置附近振动,脉冲的延迟时间固定,脉冲的循环频率F的增减变化,使得电机产生时间长短不同的振动与振动间隔;步骤三:在控制代码中预存摩尔斯编码表每个字符所对应的F参数,在需要输出相应字符时,控制器读取预存信息进行电机振动控制;其中,所发脉冲循环频率F与电机振动频率D如下公式计算得到:D=F/8000。
5.根据权利要求4所述的利用水下机器人推进电机传送信息方法,其特征在于,在上述步骤中,当脉冲循环频率降低时,电机的振动频率变低,设置电机为低频振动模式,用于传输距离较远信息量较少信号;当脉冲循环频率升高时,电机的振动频率变高,设置为高频振动模式,用于近距离传输信息量较大的信号。
说明书
技术领域
本发明属于无刷直流电机技术领域,具体地说,是一种利用水下机器人推进电机传送信息的装置及方法。
背景技术
无刷直流电机近年来得到广泛的应用,其具有控制简单、效率高、调速性能好、输出转矩大等特点。在水面与水下机器人设备的运动功能上有较为广泛的应用。水下机器人设备的通信目前采用的方式主要分为两种,一种为有线通信,常采用导线或光缆作为信道进行信息传输;另一种为无线通信,常采用无线长波通信、水声通信等无线方式。随着无刷直流电机控制技术的不断发展,使用水下机器人推进电机进行振动并利用其编码通信的方法及装置得以提出。成为一种可替代传统水下通信的方式,或成为当其余水下通信装置故障与失效时的替代方式。
为了实现这种方法及装置,在电机运转过程中,需要充分利用推进电机的空余工作区间,在需要通信时可以不借助外部设备,使用软件程序控制电机实现振动,令振动信号按照摩尔斯编码规则,实现水下信息的传输。
发明内容
本发明的目的是提供了一种利用水下机器人推进电机传送信息的方法及装置,利用电机本体振动,令振动信号按照摩尔斯编码表,很简便的实现利用电机本体进行信息传输的功能。
为了达到上述目的,本发明披露了一种利用水下机器人推进电机传送信息的装置,包括驱动模块、无刷直流电机的三相定子绕组、控制器,其中:驱动模块与无刷直流电机的三相定子绕组相连,用于驱动电机旋转、振动;控制器的6个IO接口分别和驱动模块的6个栅极输入相连,可发送PWM给6个MOS管的栅极,用于电机的正常转动。
控制器的输出IO接口,可在PWM无效时间内发送脉冲,改变电机转子瞬时的受力情况,用于控制电机振动传送信息。
本发明的进一步改进,驱动模块包括:直流电源VDC、MOS管S1、MOS管S2、MOS管S3、MOS管S4、MOS管S5、MOS管S6、二极管VD1、二极管VD2、二极管VD3、二极管VD4、二极管VD5、二极管VD6;直流电源VDC的正极分别与MOS管S1的漏极、MOS管S3的漏极、MOS管S5的漏极、二极管VD1的阴极、二极管VD3的阴极、二极管VD5的阴极相连;MOS管S1的源极、MOS管S4的漏极和无刷直流电机的A相相连,MOS管S1的源极和MOS管S4的漏极相连;MOS管S3的源极、MOS管S6的漏极和电机的B相相连,MOS管S3的源极和MOS管S6的漏极相连;MOS管S5的源极、MOS管S2的漏极和电机的C相相连,MOS管S5的源极和MOS管S2的漏极相连。
本发明的进一步改进,控制器包括:控制器的IO接口P1、IO接口P2、IO接口P3、IO接口P4、IO接口P5、IO接口P6;MOS管S1的栅极和控制器的IO接口P1相连;MOS管S2的栅极和控制器的IO接口P2相连;MOS管S3的栅极和控制器的IO接口P3相连;MOS管S4的栅极和控制器的IO接口P4相连;MOS管S5的栅极和控制器的IO接口P5相连;MOS管S6的栅极和控制器的IO接口P6相连。
本发明还提供了利用水下机器人推进电机传送信息方法的具体步骤如下:步骤一:设置控制器IO接口的脉冲模式与脉冲周期;步骤二:在电机工作空余区间内通过控制器的IO接口发送脉冲,使电机的定子在平衡位置附近振动,脉冲的延迟时间固定,脉冲的循环频率F的增减变化,使得电机产生时间长短不同的振动与振动间隔。步骤三:在控制代码中预存摩尔斯编码表每个字符所对应的F参数,在需要输出相应字符时,控制器读取预存信息进行电机振动控制。
所发脉冲循环频率F与电机振动频率D如下公式计算得到:D=F/8000。
上述方法中,当脉冲循环频率F降低至0—160Khz时,电机的振动频率为0—20hz,此时电机处于低频振动模式,用于传输距离较远信息量较少信号;当脉冲循环频率F升高至50Mhz—80Mhz时,电机的振动频率D为6.25Khz—10Khz,此时电机处于高频振动模式,用于近距离传输信息量较大的信号。
本命通过电机振动时间长短,实现摩尔斯信号的基本信号;通过延时控制,实现摩尔斯信号的时间间隔;令该摩尔斯信号按照摩尔斯编码表编码,因此起到了信息传输的效果。
其中,摩尔斯编码信号包括:两种基本信号和不同的间隔时间。两种基本信号包括:短促的点信号“·”,读“滴”(Di);保持一定时间的长信号“—”,读“嗒”(Da);间隔时间包括:“滴”,1t;“嗒”,3t;“滴”“嗒”间,1t;字符间,3t;字间,7t。
可选地,间隔时间t包括:通过电机所处振动模式的最小小时间隔τ赋值给t,最小时间间隔τ在使用低频振动模式时,τ=0.05s;最小时间间隔τ在使用高频振动模式时,τ=0.0001s;可选地,摩尔斯编码表包括:使用“·—”表示字符“A”;使用“—···”表示字符“B”;使用“—·—·”表示字符“C”;使用“—··”表示字符“D”;使用“·”表示字符“E”;使用“··—·”表示字符“F”;使用“—··”表示字符“G”;使用“····”表示字符“H”;使用“··”表示字符“I”;使用“·— — —”表示字符“J”;使用“—·—”表示字符“K”;使用“·—··”表示字符“L”;使用“— —”表示字符“M”;使用“—· ”表示字符“N”;使用“—— —”表示字符“O”;使用“·— —·”表示字符“P”;使用“— —·—”表示字符“Q”;使用“ ·—·”表示字符“R”;使用“···”表示字符“S”;使用“—”表示字符“T”;使用“··—”表示字符“U”;使用“···—”表示字符“V”;使用“·— —”表示字符“W”;使用“—··—”表示字符“X”;使用“—·— —”表示字符“Y”;使用“— — ··”表示字符“Z”;使用“·—— — —”表示字符“1”;使用“·· — — —”表示字符“2”;使用“···— —”表示字符“3”;使用“····—”表示字符“4”;使用“·····”表示字符“5”;使用“—····”表示字符“6”;使用“— —···”表示字符“7”;使用“— — —··”表示字符“8”;使用“— — — —·”表示字符“9”;使用“— — — — —”表示字符“0”。
本发的有益效果:1、通过利用推进电机的工作空余时间产生振动信号,实现信息传输,可替代传统水下通信的方式,或成为当其余水下通信装置故障与失效时的替代方式。2、通过摩尔斯编码信号的信息传输方式,便于加密与解密,提高水下信息传输的保密性。3、当脉冲循环频率降低时,电机的振动频率变低,可设置电机为低频振动模式,用于传输距离较远信息量较少信号;当脉冲循环频率升高时,电机的振动频率变高,可设置为高频振动模式,用于近距离传输信息量较大的信号。
附图说明
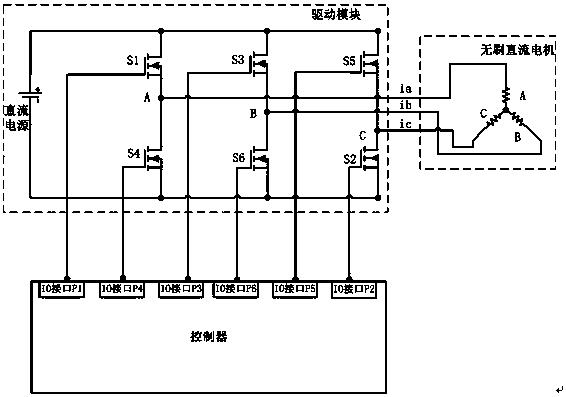
图1为本发明一种利用水下机器人推进电机传送信息装置的电路原理图。
图2为本发明一种利用水下机器人推进电机传送信息装置的指示方法流程图。
具体实施方式
为了加深对本发明的理解,下面将结合附图和实施例对本发明做进一步详细描述,该实施例仅用于解释本发明,并不对本发明的保护范围构成限定。
实施例:如图1所示,一种利用水下机器人推进电机传送信息的装置,包括驱动模块、无刷直流电机的三相定子绕组、控制器,驱动模块与无刷直流电机的三相定子绕组相连,用于驱动电机旋转、发音;控制器的6个IO接口分别和驱动模块的6个栅极输入相连,可发送PWM给6个MOS管的栅极,用于电机的正常转动;同时IO接口也可在PWM无效时间内发送脉冲,改变电机转子瞬时的受力情况,用于电机相对于初始位置振动。
在本实施例中,驱动模块包括直流电源VDC、MOS管S1、MOS管S2、MOS管S3、MOS管S4、MOS管S5、MOS管S6、二极管VD1、二极管VD2、二极管VD3、二极管VD4、二极管VD5、二极管VD6;直流电源VDC的正极分别与MOS管S1的漏极、MOS管S3的漏极、MOS管S5的漏极、二极管VD1的阴极、二极管VD3的阴极、二极管VD5的阴极相连;直流电源的负极分别和MOS管S4的源极、MOS管S6的源极、MOS管S2的源极、二极管VD4的阳极、二极管VD6的阳极、二极管VD2的阳极相连;MOS管S1的源极、MOS管S4的漏极和无刷直流电机的A相相连,MOS管S1的源极和MOS管S4的漏极相连;MOS管S3的源极、MOS管S6的漏极和电机的B相相连,MOS管S3的源极和MOS管S6的漏极相连;MOS管S5的源极、MOS管S2的漏极和电机的C相相连,MOS管S5的源极和MOS管S2的漏极相连。
在本实施例中,控制器包括:控制器的IO接口P1、IO接口P2、IO接口P3、IO接口P4、IO接口P5、IO接口P6;所述MOS管S1的栅极和所述控制器的IO接口P1相连;所述MOS管S2的栅极和所述控制器的IO接口P2相连;所述MOS管S3的栅极和所述控制器的IO接口P3相连;所述MOS管S4的栅极和所述控制器的IO接口P4相连;所述MOS管S5的栅极和所述控制器的IO接口P5相连;所述MOS管S6的栅极和所述控制器的IO接口P6相连。
如图2所示,一种利用水下机器人推进电机传送信息的方法,以电机正常工作时导通MOS管S1、S6使用低频振动模式发送字符串信息“X SOS”为例介绍具体操作步骤:步骤A1:设置控制器IO接口的脉冲模式与脉冲周期;步骤A2:在电机工作空余区间内通过控制器的IO接口给MOS管S1和S6各发一个脉冲,脉冲的延迟时间固定,脉冲的循环频率F的增减变化,使得电机产生时间长短不同的振动与振动间隔;步骤A3:在控制代码中预存摩尔斯编码表每个字符所对应的F参数,在需要输出相应字符时,控制器读取预存信息进行电机振动控制。
其中,所发脉冲循环频率F与电机振动频率D如下公式计算得到:D=F/8000。当脉冲循环频率F降低至0—160Khz时,电机的振动频率为0—20hz,此时电机处于低频振动模式,用于传输距离较远信息量较少信号;当脉冲循环频率F升高至50Mhz—80Mhz时,电机的振动频率D为6.25Khz—10Khz,此时电机处于高频振动模式,用于近距离传输信息量较大的信号。
可选地,当脉冲循环频率降低时,电机的振动频率变低,可设置电机为低频振动模式,用于传输距离较远信息量较少信号;当脉冲循环频率升高时,电机的振动频率变高,可设置为高频振动模式,用于近距离传输信息量较大的信号。
可选地,通过电机振动时间长短,实现所述摩尔斯信号的基本信号;通过延时控制,实现所述摩尔斯信号的时间间隔;令该摩尔斯信号按照所述摩尔斯编码表编码。
可选地,“—”表示“嗒”信号,“·”表示“嘀”信号,字符串信息“X SOS”的表示步骤如下:1、“X”字符的第一位“—”信号,通过电机持续振动0.15s表示。2、通过电机持续空操作0.05s来表示第二位“·”信号与第一位“—”信号之间的间隔信号。3、“X”字符的第二位“·”信号,通过电机持续振动0.05s表示。4、通过电机持续空操作0.05s来表示第三位“·”信号与第二位“·”信号之间的间隔信号。5、“X”字符的第三位“·”信号,通过电机持续振动0.05s表示。6、通过电机持续空操作0.05s来表示第四位“—”信号与第三位“·”信号之间的间隔信号。7、“X”字符的第四位“—”信号,通过电机持续振动0.15s表示。8、通过电机持续空操作0.35s来表示“X”与“SOS”之间的字间间隔信号。9、第一个“S”字符的第一位“·”,通过电机持续振动0.05s表示。10、通过电机持续空操作0.05s来表示第二位“·”信号与第一位“·”信号之间的间隔信号。11、第一个“S”字符的第二位“·”,通过电机持续振动0.05s表示。12、通过电机持续空操作0.05s来表示第三位“·”信号与第二位“·”信号之间的间隔信号。13、第一个“S”字符的第三位“·”,通过电机持续振动0.05s表示。14、通过电机持续空操作0.15s来表示第二个“O”字符与第一个“S”字符间的间隔信号15、第二个“O”字符的第一位“—”信号,通过电机持续振动0.15s表示。16、通过电机持续空操作0.05s来表示第二位“—”信号与第一位“—”信号之间的间隔信号。17、第二个“O”字符的第二位“—”信号,通过电机持续振动0.15s表示。18、通过电机持续空操作0.05s来表示第三位“—”信号与第二位“—”信号之间的间隔信号。19、第二个“O”字符的第三位“—”信号,通过电机持续振动0.15s表示。20、通过电机持续空操作0.15s来表示第三个“S”字符与第二个“O”字符间的间隔信号。21、第三个“S”字符的第一位“·”,通过电机持续振动0.05s表示。22、通过电机持续空操作0.05s来表示第二位“·”信号与第一位“·”信号之间的间隔信号。23、第三个“S”字符的第二位“·”,通过电机持续振动0.05s表示。24、通过电机持续空操作0.05s来表示第三位“·”信号与第二位“·”信号之间的间隔信号。25、第三个“S”字符的第三位“·”,通过电机持续振动0.05s表示。
在本实施例中,选用额定电压为24V、额定转速为3000rpm无刷直流电机进行水下振动试验。控制器采用STM32F103C8T6控制器。按键模块包括3个按键,分别是按照摩尔斯编码表顺序的正序加键和正序减按键和启动停止按键。
以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
价值度评估
技术价值
经济价值
法律价值
0 0 059.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:59.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个实施例】、【1 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间6 年】专利权的维持时间越长,其价值对于权利人而言越高。 尤其重要是,该专利 【权利转移1 次】、 都从侧面反应出该专利的技术、经济和法律价值。
技术价值 31.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
20 个月独立权利要求数量
2 个从属权利要求数量
1 个说明书页数
4 页实施例个数
1 个发明人数量
5 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
1 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 9.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
院校许可备案
0 次权利质押
0 次权利转移
1 个海关备案
否法律价值 19.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
6法律状态
有权-审定授权







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...