【中国实用新型】运架一体机
无权-未缴年费 中国
- 申请号:
- CN201820363773.X
- 专利权人:
- 中铁第五勘察设计院集团有限公司;中铁十一局集团有限公司
- 授权公告日/公开日:
- 2018.10.19
- 专利有效期:
- 2018.03.17-2028.03.17
- 技术分类:
- E01:道路、铁路或桥梁的建筑
- 转化方式:
- 许可
- 价值度指数:
-
- 58.0分
- 价格:
- 面议
发布人
中铁第五勘察设计院集团有限公司
联系人陈女士
-

- 0519-88238872



-

- 北京市大兴区黄村镇康庄路9号
- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201820363773.X
- 申请日
- 20180317
- 公开/公告号
- CN207987763U
- 公开/公告日
- 20181019
- 申请/专利权人
- [中铁第五勘察设计院集团有限公司, 中铁十一局集团有限公司]
- 发明/设计人
- [王治斌, 谌启发, 梁志新, 万鹏, 蒋中明, 王嵽显, 桂婞, 周光忠, 朱雄, 唐达昆, 徐浩然, 郭吉祥, 李青, 张光明, 汤友富, 杨建福, 何义斌, 王慨慷]
- 主分类号
- E01D21/00
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 北京(11)
- 颁证日
- G06T1/00
- 代理人
- [要然]
摘要
本实用新型涉及桥梁机械技术领域,尤其涉及一种运架一体机。本实用新型的运架一体机,包括运梁机和导梁机:运梁机包括运梁主梁,运梁主梁上设有台车连接机构;导梁机包括导梁主梁和多功能台车,多功能台车设置于导梁主梁上,多功能台车顶部设有台车悬挂机构;其中,台车连接机构与台车悬挂机构配合,以使运梁主梁装载导梁主梁。本实用新型的运架一体机,在导梁机带动运梁机移动时,运梁机和导梁机能够相互连接,使桥梁架设工作可靠、高效。
法律状态
| 法律状态公告日 | 20260313 |
| 法律状态 | 专利权的终止 |
| 法律状态信息 | 未缴年费专利权终止 IPC(主分类):E01D 21/00 专利号:ZL201820363773X 申请日:20180317 授权公告日:20181019 终止日期: |
| 法律状态公告日 | 20181019 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
权利要求
权利要求数量(10)
独立权利要求数量(1)
1.一种运架一体机,包括运梁机和导梁机,其特征在于:
所述运梁机包括运梁主梁,所述运梁主梁上设有台车连接机构;
所述导梁机包括导梁主梁和多功能台车,所述多功能台车设置于所述导梁主梁上,所 述多功能台车顶部设有台车悬挂机构;其中,
所述台车连接机构与所述台车悬挂机构配合,以使所述运梁主梁装载所述导梁主梁。
2.根据权利要求1所述的运架一体机,其特征在于:所述台车连接机构包括运梁连接部 和台车连接部,所述台车连接部与所述台车悬挂机构连接,所述运梁连接部连接所述台车 连接部与所述运梁主梁。
3.根据权利要求2所述的运架一体机,其特征在于:所述运梁连接部固定于所述运梁主 梁的底部,并且可沿竖直方向做伸缩运动。
4.根据权利要求2所述的运架一体机,其特征在于:所述台车连接部可移动地设置于所 述运梁连接部的底部,并且可沿所述运梁主梁长度方向移动。
5.根据权利要求1所述的运架一体机,其特征在于:所述台车悬挂机构通过台车挂架与 所述多功能台车连接,所述台车挂架可沿竖直方向伸长或缩短,并带动所述多功能台车远 离或靠近所述运梁主梁。
6.根据权利要求5所述的运架一体机,其特征在于:所述台车挂架包括沿竖直方向由上 至下依次连接的伸缩挂架、第一调节段和第二调节段,所述第二调节段可移动地穿设于所 述第一调节段内,所述第一调节段可移动地穿设于所述伸缩挂架内,所述伸缩挂架与所述 台车悬挂机构固定连接。
7.根据权利要求5所述的运架一体机,其特征在于:所述多功能台车的顶部还设有台车 挂梁和台车顶梁,所述台车挂梁连接于所述台车挂架的底部,所述台车顶梁沿竖直方向相 对于所述台车挂架移动地设置于所述台车挂架和多功能台车之间。
8.根据权利要求1所述的运架一体机,其特征在于:所述多功能台车与所述导梁主梁可 移动连接,且所述多功能台车可沿所述导梁主梁的长度方向与所述导梁主梁做相对移动。
9.根据权利要求8所述的运架一体机,其特征在于:所述多功能台车与所述导梁主梁之 间设有相对移动机构,用于驱使所述多功能台车与所述导梁主梁沿所述导梁主梁的长度方 向做相对移动。
10.根据权利要求8所述的运架一体机,其特征在于:所述多功能台车包括多个小车和 整体式车架;所述小车分别沿所述导梁主梁的长度方向设置且与所述导梁主梁可移动连 接,所述小车可沿所述导梁主梁的长度方向移动;所述小车分别连接于所述整体式车架的 顶部内侧;所述台车悬挂结构分别设置于靠近所述导梁主梁后端的两个所述小车顶部。
1.一种运架一体机,包括运梁机和导梁机,其特征在于:
所述运梁机包括运梁主梁,所述运梁主梁上设有台车连接机构;
所述导梁机包括导梁主梁和多功能台车,所述多功能台车设置于所述导梁主梁上,所述多功能台车顶部设有台车悬挂机构;其中,
所述台车连接机构与所述台车悬挂机构配合,以使所述运梁主梁装载所述导梁主梁。
2.根据权利要求1所述的运架一体机,其特征在于:所述台车连接机构包括运梁连接部和台车连接部,所述台车连接部与所述台车悬挂机构连接,所述运梁连接部连接所述台车连接部与所述运梁主梁。
3.根据权利要求2所述的运架一体机,其特征在于:所述运梁连接部固定于所述运梁主梁的底部,并且可沿竖直方向做伸缩运动。
4.根据权利要求2所述的运架一体机,其特征在于:所述台车连接部可移动地设置于所述运梁连接部的底部,并且可沿所述运梁主梁长度方向移动。
5.根据权利要求1所述的运架一体机,其特征在于:所述台车悬挂机构通过台车挂架与所述多功能台车连接,所述台车挂架可沿竖直方向伸长或缩短,并带动所述多功能台车远离或靠近所述运梁主梁。
6.根据权利要求5所述的运架一体机,其特征在于:所述台车挂架包括沿竖直方向由上至下依次连接的伸缩挂架、第一调节段和第二调节段,所述第二调节段可移动地穿设于所述第一调节段内,所述第一调节段可移动地穿设于所述伸缩挂架内,所述伸缩挂架与所述台车悬挂机构固定连接。
7.根据权利要求5所述的运架一体机,其特征在于:所述多功能台车的顶部还设有台车挂梁和台车顶梁,所述台车挂梁连接于所述台车挂架的底部,所述台车顶梁沿竖直方向相对于所述台车挂架移动地设置于所述台车挂架和多功能台车之间。
8.根据权利要求1所述的运架一体机,其特征在于:所述多功能台车与所述导梁主梁可移动连接,且所述多功能台车可沿所述导梁主梁的长度方向与所述导梁主梁做相对移动。
9.根据权利要求8所述的运架一体机,其特征在于:所述多功能台车与所述导梁主梁之间设有相对移动机构,用于驱使所述多功能台车与所述导梁主梁沿所述导梁主梁的长度方向做相对移动。
10.根据权利要求8所述的运架一体机,其特征在于:所述多功能台车包括多个小车和整体式车架;所述小车分别沿所述导梁主梁的长度方向设置且与所述导梁主梁可移动连接,所述小车可沿所述导梁主梁的长度方向移动;所述小车分别连接于所述整体式车架的顶部内侧;所述台车悬挂结构分别设置于靠近所述导梁主梁后端的两个所述小车顶部。
说明书
技术领域
本实用新型涉及桥梁机械技术领域,尤其涉及一种运架一体机。
背景技术
运架一体机能用于在混凝土梁场吊运客运专线混凝土箱梁,并能够在桥位架设混凝土箱梁。与传统的运架设备相比,运架一体机具有施工速度快,机动灵活,可实现隧道口零距离架桥、在山区中桥隧相连的隧道口架桥无需拆解任何部件,不需要辅助机械和过多人工等优点。
现有的运架一体机主要包括运梁机和导梁机两部分,运梁机用于吊运导梁机和混凝土箱梁,导梁机用于引导运梁机吊放混凝土箱梁。但是,现有运架一体机的的运梁机主动在导梁机上行走,并且运梁机和导梁机不具有连接结构,使运架一体机桥梁架设工作的操作繁琐、工作效率较低。
因此,针对以上不足,需要提供一种在导梁机带动运梁机移动时,运梁机和导梁机能够相互连接,使桥梁架设工作可靠、高效的运架一体机。
发明内容
(一)要解决的技术问题
本实用新型要解决的技术问题是解决现有技术中的运架一体机,其运梁机和导梁机不具有连接结构,使运架一体机桥梁架设工作的操作繁琐、工作效率较低的问题。
(二)技术方案
为了解决上述技术问题,本实用新型提供了一种运架一体机,包括运梁机和导梁机:
运梁机包括运梁主梁,运梁主梁上设有台车连接机构;
导梁机包括导梁主梁和多功能台车,多功能台车设置于导梁主梁上,多功能台车顶部设有台车悬挂机构;其中,
台车连接机构与台车悬挂机构配合,以使运梁主梁装载导梁主梁。
进一步地,台车连接机构包括运梁连接部和台车连接部,台车连接部与台车悬挂机构连接,运梁连接部连接台车连接部与运梁主梁。
进一步地,运梁连接部固定于运梁主梁的底部,并且可沿竖直方向做伸缩运动。
进一步地,台车连接部可移动地设置于运梁连接部的底部,并且可沿运梁主梁长度方向移动。
进一步地,台车悬挂机构通过台车挂架与多功能台车连接,台车挂架可沿竖直方向伸长或缩短,并带动多功能台车远离或靠近运梁主梁。
进一步地,台车挂架包括沿竖直方向由上至下依次连接的伸缩挂架、第一调节段和第二调节段,第二调节段可移动地穿设于第一调节段内,第一调节段可移动地穿设于伸缩挂架内,伸缩挂架与台车悬挂机构固定连接。
进一步地,多功能台车的顶部还设有台车挂梁和台车顶梁,台车挂梁连接于台车挂架的底部,台车顶梁沿竖直方向相对于台车挂架移动地设置于台车挂架和多功能台车之间。
进一步地,多功能台车与导梁主梁可移动连接,且多功能台车可沿导梁主梁的长度方向与导梁主梁做相对移动。
进一步地,多功能台车与导梁主梁之间设有相对移动机构,用于驱使多功能台车与导梁主梁沿导梁主梁的长度方向做相对移动。
进一步地,多功能台车包括多个小车和整体式车架;小车分别沿导梁主梁的长度方向设置且与导梁主梁可移动连接,小车可沿导梁主梁的长度方向移动;小车分别连接于整体式车架的顶部内侧;台车悬挂结构分别设置于靠近导梁主梁后端的两个小车顶部。
(三)有益效果
本实用新型的上述技术方案与现有技术相比具有如下优点:
本实用新型的运架一体机,其运梁机的运梁主梁上设有台车连接机构,导梁机的多功能台车顶部设有台车悬挂机构,运架一体机可以通过台车连接机构与台车悬挂机构配合,以使导梁机在带动运梁机移动时,运梁机不与导梁机带动其移动的装置分离,保证运梁机移动的可靠性,提高架梁的工作效率,其结构简单,并且具有简便的桥梁架设的操作方法,能够降低桥梁架设的成本。
附图说明
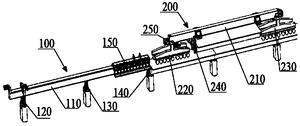
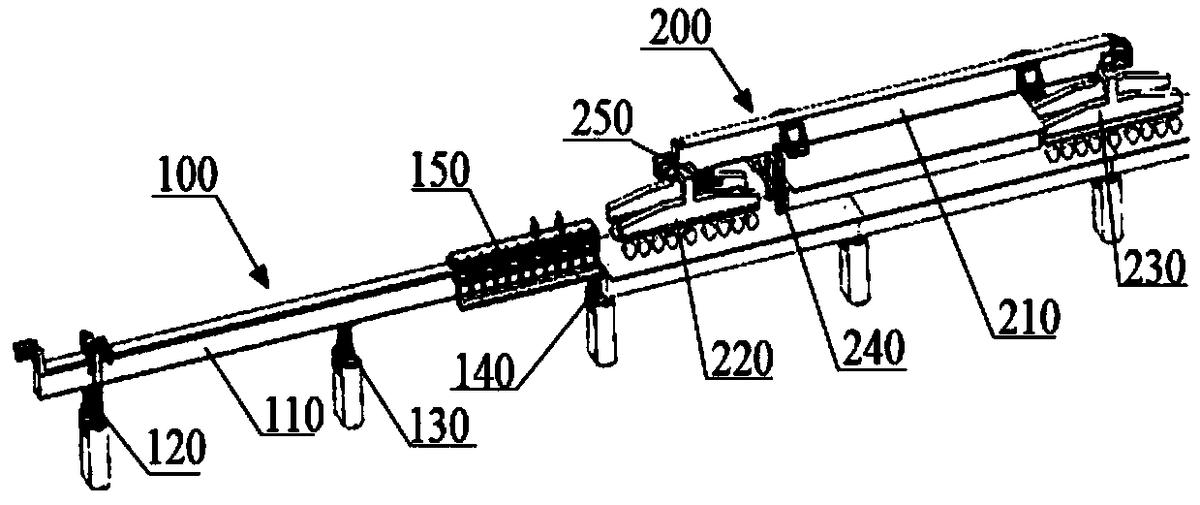
图1是本实用新型实施例的运架一体机的结构示意图;
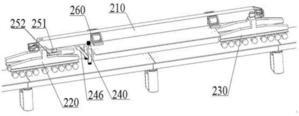
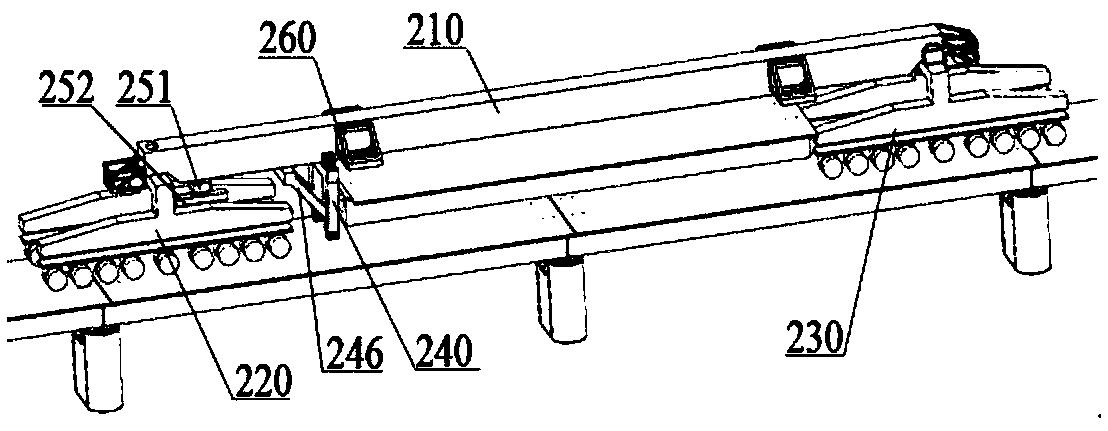
图2是本实用新型实施例运架一体机的运梁机的结构示意图;
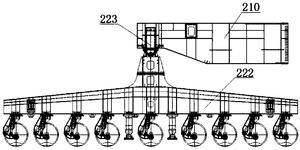
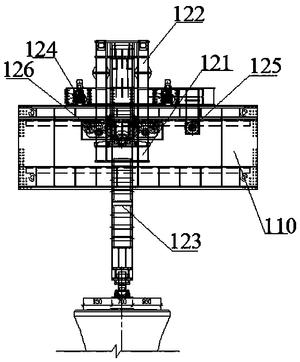
图3是本实用新型实施例运梁机的前行走系统的主视图;
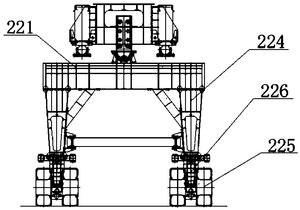
图4是本实用新型实施例运梁机的前行走系统的左视图;
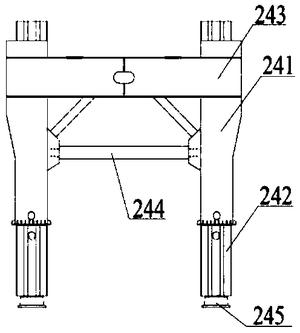
图5是本实用新型实施例运梁机的伸缩式运梁支腿的结构示意图;
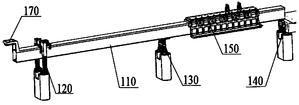
图6是本实用新型实施例运架一体机的导梁机的结构示意图;
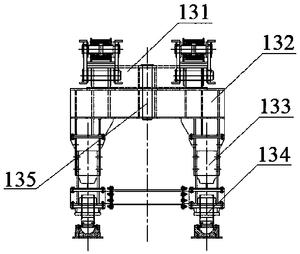
图7是本实用新型实施例导梁机的中导梁支腿的结构示意图;
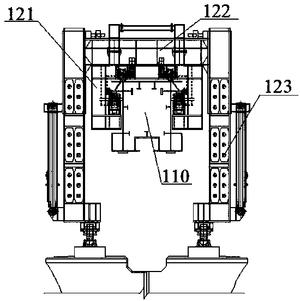
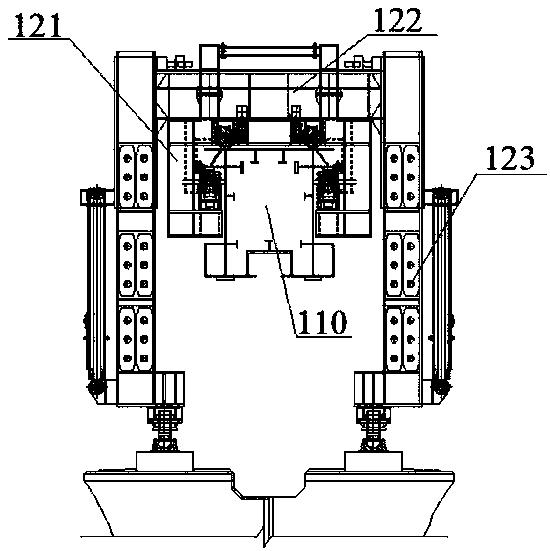
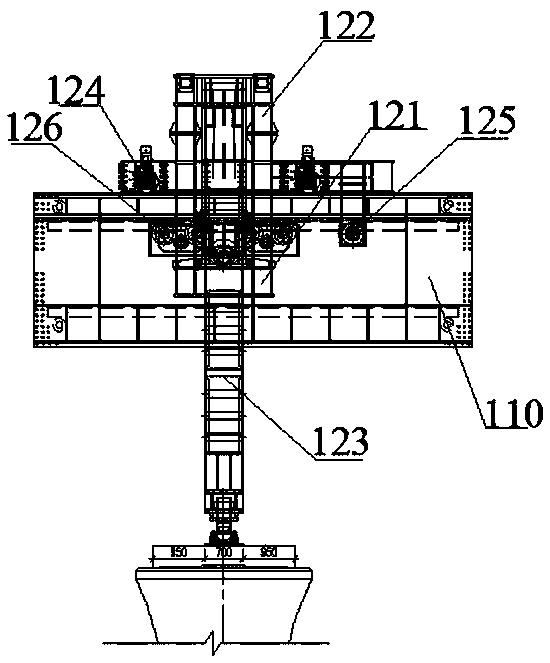
图8是本实用新型实施例导梁机的前导梁支腿的左视图;
图9是本实用新型实施例导梁机的前导梁支腿的主视图;
图10是本实用新型实施例导梁机的后导梁支腿的左视图;
图11是本实用新型实施例导梁机的后导梁支腿的主视图;
图12是本实用新型实施例导梁机的千斤顶支架的结构示意图;
图13是本实用新型实施例导梁机的多功能台车的结构示意图;
图14是本实用新型实施例多功能台车的小车的结构示意图;
图15是本实用新型实施例多功能台车的台车悬挂机构的结构示意图;
图16是本实用新型实施例多功能台车的第三小车的结构示意图;
图17-31是应用本实用新型实施例的运架一体机将导梁机安装于架梁工位的方法的工况流程图。
具体实施方式
为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
在本实用新型实施例中,如图1所示,本实用新型实施例的运架一体机,包括导梁机100和运梁机200,其中,运梁机200用于提吊导梁机100和混凝土箱梁(以下简称“箱梁”),导梁机100辅助运梁机200,以配合实现桥梁架设中的过孔架梁。具体地,运梁机200能够运输导梁机100,并且与导梁机100配合使导梁机100留在架梁工位。运梁机200还能够往返于梁场与架梁工位之间,运输箱梁,并且与导梁机100配合完成箱梁的架设。
如图2所示,运梁机200包括运梁主梁210、前行走系统220、后行走系统230、起吊提升结构260和伸缩式运梁支腿240。其中,运梁主梁210为箱体结构的横梁,前行走系统220和后行走系统230分别固定连接于运梁主梁210的两端,前行走系统220固定于运梁主梁210的前端,后行走系统230固定于运梁主梁210的后端。伸缩式运梁支腿240设置于运梁主梁210的底面,伸缩式运梁支腿240设置于前行车系统和后行车系统之间且靠近前行车系统。起吊提升结构260为两个,两个起吊提升机构分别固定于运梁主梁210的底面上,并且位于伸缩式运梁支腿240和后行走系统230之间。两个起吊提升结构260之间的距离与箱梁的长度相同。起吊提升机构用于将箱梁吊起,前行走系统220和后行走系统230用于带动运梁主梁210及运梁机200的其他结构同步移动,以使运梁机200能够运输导梁机100和箱梁。当运梁机200需要固定时,伸缩式运梁支腿240能够支撑于底面,以对运梁机200进行位置固定。
需要说明的是,在本实用新型实施例中,运梁主梁210的前端与运梁机200的前端为同一端部,具体的为运梁机200在进行桥梁架设工作时靠近导梁机100或者与导梁机100连接的一端;运梁主梁210的后端与运梁机200的后端为同一端部,具体的为运梁机200在进行桥梁架设工作时远离导梁机100或者不与导梁机100连接的一端。
具体地,每个起吊提升结构260包括两个起吊单元,两个起吊单元对称固定于运梁主梁210的两侧。每个起吊提升结构260分别用于与箱梁的前、后两端连接,并将箱梁吊起,以方便对箱梁的运输。
运梁主梁210前端的底面设有向内凹设的台阶面,前行走系统220固定于台阶面上。由于运梁主梁210前端设置了台阶面,因此能够防止导梁主梁110与运梁主梁210连接时,运梁主梁210的前端底面与导梁主梁110的后端产生碰撞或摩擦,避免阻碍运梁主梁210与导梁机100之间连接,而导致运梁机200无法运输导梁机100。
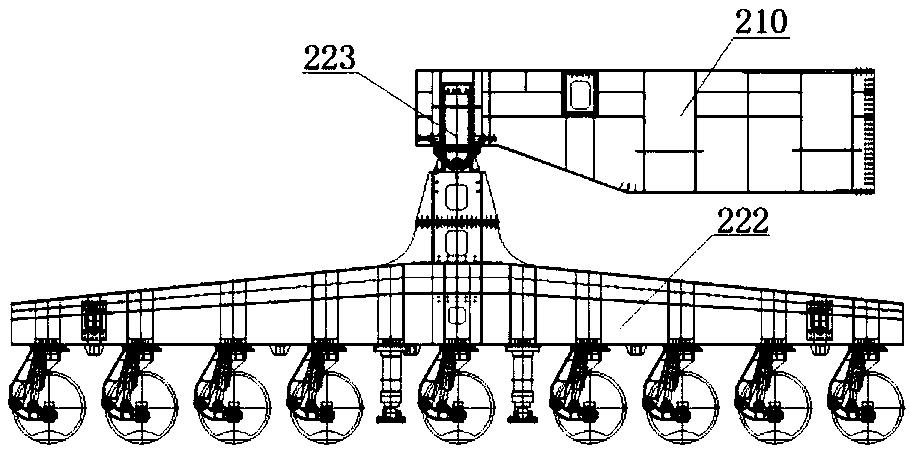
在本实用新型实施例中,前行车系统和后行车系统可同步带动运梁主梁210做升降运动,以使运梁主梁210沿竖直方向做升降运动。具体地,前行走系统220包括前行走支架221,前行走支架221与运梁主梁210的前端连接,并且能够带动运梁主梁210做升降运动。前行走系统220还包括前行走轮组222,前行走轮组222设置于前行走支架221底部,并且能够带动前行走支架221做升降运动。前行走轮组222为两个,两个前行走轮组222沿运梁主梁210的长度方向平行设置,且两个前行走轮组222之间的距离大于导梁机100的最大宽度。后行走系统230包括后行走支架,后行走支架与运梁主梁210的后端连接,并且能够带动运梁主梁210做升降运动。后行走系统230还包括后行走轮组,后行走轮组设置于后行走支架底部,并且能够带动后行走支架做升降运动。后行走轮组为两个,两个后行走轮组沿运梁主梁210的长度方向平行设置,且两个后行走轮组之间的距离大于导梁机100的最大宽度。
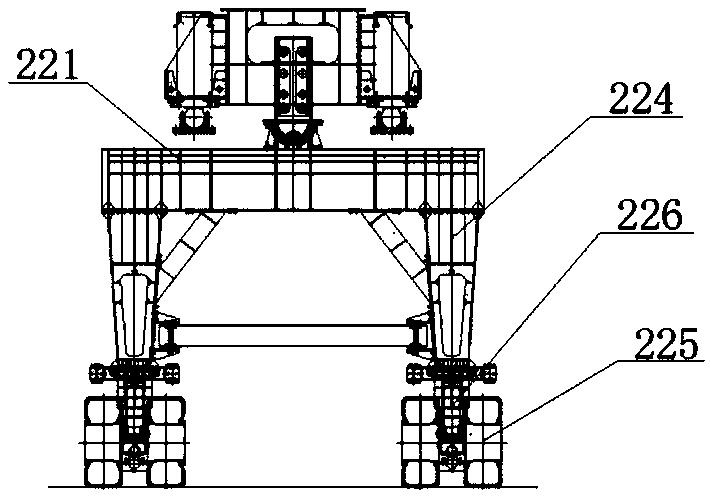
由于在本实用新型实施例中前行走系统220与后行走系统230的结构相同,如图3-4所示,以前行走系统220为例进行说明。前行走系统220包括前行走支架221和两个前行走轮组222,前行走支架221用于将前行走轮组222连接于运梁主梁210下端,以使前行走轮组222能够带动运梁主梁210的前端移动。前行走支架221的中点通过前行走升降系统223固定于运梁主梁210的前端,前行走升降系统223可以为前行走液压油缸,前行走液压油缸能够使运梁主梁210沿竖直方向升高或者降低,以满足不同架梁高度的需求。同时,前行走支架221沿运梁主梁210的长度方向设置,并且前行走支架221的底端两侧各沿运梁主梁210的长度方向设置一个前行走轮组222,两个前行走轮组222之间的距离大于导梁机100的最大宽度,以使导梁机100能够从两个前行走轮组222之间穿过,方便运梁机200和导梁机100配合,使导梁机100移动至架梁工位或完成箱梁的架设。前行走轮组222通过前轮液压油缸连接于前行走支架221底部,并且能够带动前行走支架221做升降运动,进一步带动运梁主梁210升高或者降低。
两个前行走轮组222的结构相同,均包括竖直设置的前轮支架224,每个前轮支架224底部分别均匀分布多个前行走滚轮225。各个前行走滚轮225通过前转向机构与前轮支架224连接。具体地,前转向机构上竖直设置有前转向轴,前转向轴能够沿其轴线转动,前行走滚轮225固定于前转向轴的底端,使前转向轴能够带动前行走滚轮225以前转向轴的轴线为轴转动,从而完成对前行走滚轮225行走方向的调整。前行走滚轮225还对应设置有前行走转向系统226、前行走动力系统和前行走制动系统,前行走转向系统226能够带动前转向轴转动,以改变前行走滚轮225的行走方向,前行走动力系统能够带动前行走滚轮225向前或者向后滚动,前行走制动系统能够控制前行走滚轮225停止运动。
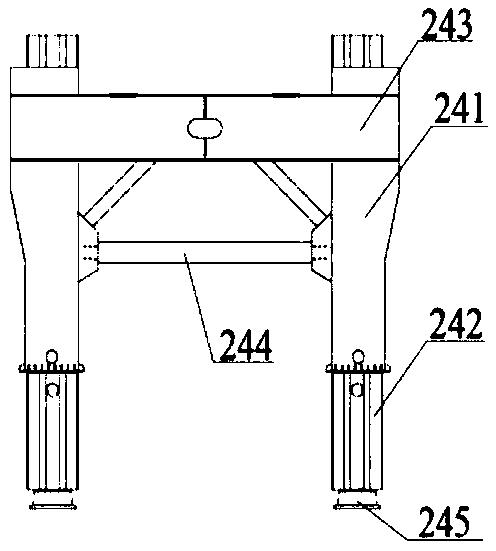
如图5所示,伸缩式运梁支腿240能够沿其长度方向伸长或缩短。具体地,伸缩式运梁支腿240包括一级运梁支腿241和二级运梁支腿242,一级运梁支腿241与运梁主梁210连接,二级运梁支腿242与一级运梁支腿241滑动连接,以使二级运梁支腿242能够沿一级运梁支腿241的长度方向相对于一级运梁支腿241移动,从而实现利用伸缩式运梁支腿240对运梁机200的位置固定。
伸缩式运梁支腿240还包括运梁支腿横梁243,运梁支腿横梁243用于将一级运梁支腿241与运梁主梁210连接,运梁支腿横梁243水平设置且与运梁主梁210连接,一级运梁支腿241固定于运梁支腿横梁243的两端。
其中,运梁支腿横梁243的中点固定于运梁主梁210上,并且运梁支腿横梁243垂直于运梁主梁210设置,运梁支腿横梁243两端分别连接一级运梁支腿241,一级运梁支腿241分别垂直于运梁支腿横梁243设置。二级运梁支腿242穿设于一级运梁支腿241支腿内,二级运梁支腿242与运梁支腿液压油缸连接,并且控制二级运梁支腿242沿一级运梁支腿241的长度方向移动。
伸缩式运梁支腿240还包括运梁支腿连接系244,运梁支腿连接系244为三角架结构,且分别与一级运梁支腿241、二级运梁支腿242和运梁支腿横梁243固定连接。梁支腿连接系起到支撑和固定一级运梁支腿241、二级运梁支腿242、运梁支腿横梁243的作用。
伸缩式运梁支腿240还包括运梁球铰底座245,运梁球铰底座245固定于二级运梁支腿242底部。
为了能够使伸缩式运梁支腿240能够适应坡道,在本实用新型实施例中,伸缩式运梁支腿240的顶端与运梁主梁210转动连接,以使伸缩式运梁支腿240在运梁主梁210下方沿运梁主梁210的长度方向摆动。并且,伸缩式运梁支腿240与运梁主梁210之间设有运梁斜支撑梁246。
在本实用新型的一个实施例中,运梁斜支撑梁246与运梁主梁210固定连接,运梁斜支撑梁246与伸缩式运梁支腿240铰接连接,运梁斜支撑梁246可沿其长度方向伸缩,以改变伸缩式运梁支腿240与运梁主梁210之间的角度。具体地,运梁斜支撑梁246的底端与二级运梁支腿242的下端铰接连接,运梁斜支撑梁246通过运梁斜液压油缸与运梁主梁210固定连接,液压油缸能够驱动运梁斜支撑梁246进行伸缩运动,从而能够改变伸缩式运梁支腿240与运梁主梁210之间的角度。
在本实用新型的另一个实施例中,运梁斜支撑梁246的一端与运梁主梁210铰接连接,伸缩式运梁支腿240上设有多个连接点,运梁斜支撑梁246的另一端能够与不同的连接点连接,以改变伸缩式运梁支腿240与运梁主梁210之间的角度。具体地,伸缩式运梁支腿240的一级运梁支腿241和二级运梁支腿242上沿其长度方向设有多个连接点,运梁斜支撑梁246通过与不同的连接点连接,以改变伸缩式运梁支腿240与运梁主梁210之间的角度。其中,连接点可以为插槽,运梁斜支撑梁246通过插设于插槽中,以与不同的插槽连接。
如图2所示,运梁机200还包括台车连接机构250,台车连接机构250固定于运梁主梁210的下表面,并且位于前行车系统和伸缩式运梁支腿240之间,用于与导梁机100的台车连接,以对导梁机100进行运输和位置固定。具体地,台车连接机构250包括台车连接部251和运梁连接部252,台车连接部251与台车悬挂机构154连接,运梁连接部252连接台车连接部251与运梁主梁210。运梁连接部252固定于运梁主梁210的底部,具体地,运梁连接部252可以通过运梁连接液压油缸与运梁主梁210连接,并且可沿竖直方向做伸缩运动。台车连接部251可移动地设置于运梁连接部252的底部,具体地,台车连接部251可以通过台车连接液压油缸与运梁连接部252连接,并且可沿运梁主梁210长度方向移动。因此,运梁连接部252能够带动台车连接部251上下移动,以调整台车连接部251高度,台车连接部251能够沿运梁主梁210前后移动,以与多功能台车150连接或解除连接。
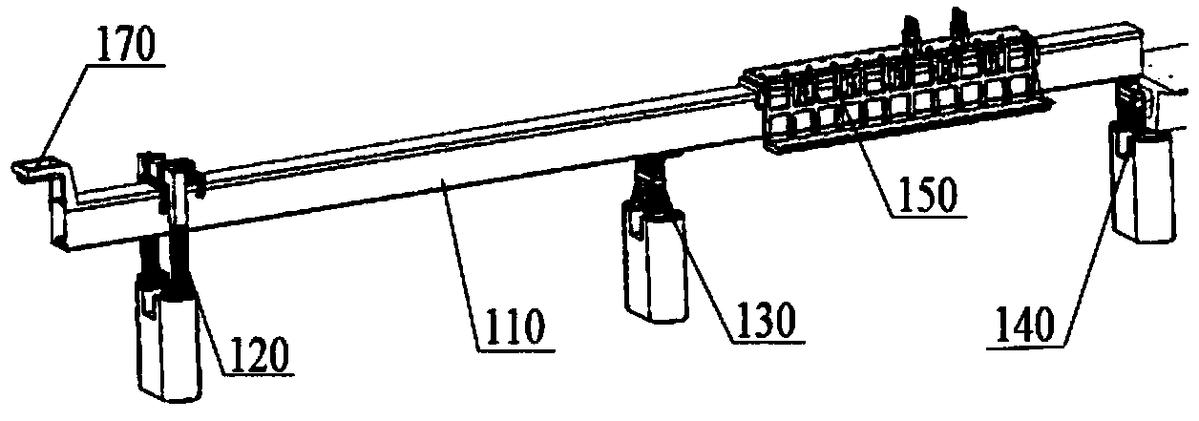
如图6所示,导梁机100包括导梁主梁110、前导梁支腿120、中导梁支腿130和后导梁支腿140,前导梁支腿120、中导梁支腿130和后导梁支腿140分别设置于导梁主梁110上。其中,前导梁支腿120和中导梁支腿130分别可沿导梁主梁110的长度方向在导梁主梁110上移动。并且前导梁支腿120始终竖直设置,能够伸出或缩回导梁主梁110的底面。当前导梁支腿120伸出导梁主梁110的底面时,能够支撑导梁主梁110;当前导梁支腿120缩回导梁主梁110的底面时,能够防止其由于接触地面或其他障碍物而阻碍运梁机200运输导梁机100。中导梁支腿130可竖直设置且位于导梁主梁110的下方,也可以在导梁主梁110的前端被前悬挂装置170吊起且吊设于导梁主梁110的前端,并且中导梁支腿130的底面不低于导梁主梁110的底面。当中导梁支腿130位于导梁主梁110的下方时,能够支撑导梁主梁110;当中导梁支腿130被吊设于导梁主梁110的前端时,能够防止中导梁支腿130接触地面或其他障碍物而阻碍运梁机200运输导梁机100。后导梁支腿140与导梁主梁110的后端转动连接,因此,后导梁支腿140能够在竖直面内旋转,以使后导梁支腿140能够垂直设置于导梁主梁110的下方或平行设置于导梁主梁110的后端。当后导梁支腿140竖直设置时,能够支撑导梁主梁110;当后导梁支腿140水平设置时,能够防止阻碍运梁机200运输导梁机100。
需要说明的是,在本实用新型实施例中,导梁主梁110的前端与导梁机100的前端为同一端部,具体的为导梁机100在进行桥梁架设工作时远离运梁机200或者不与运梁机200连接的一端;导梁主梁110的后端与导梁机100的后端为同一端部,具体的为导梁机100在进行桥梁架设工作时靠近运梁机200或者与运梁机200连接的一端。
本实用新型实施例中,导梁主梁110的前端设有前悬架结构,导梁主梁110的底面上沿中心线设有中支腿导轨,中支腿导轨延伸至前悬架结构的底面,中导梁支腿130通过中轮系与中支腿导轨配合连接于导梁主梁110下方,使中导梁支腿130与中支腿导轨连接,以使中导梁支腿130可沿导梁主梁110的长度方向在导梁主梁110和前悬架结构下方移动。其中,中导梁支腿130能够滑动至导梁主梁110的前端,并最终能够吊设于导梁主梁110前端的前悬挂机构上;中导梁支腿130也能够移动至导梁主梁110的后端,并且最终移动至靠近后导梁支腿140的位置。在中导梁支腿130移动的过程中,由于其最大宽度与导梁主梁110的宽度相同,并且位于导梁主梁110的正下方,因此,不会阻碍到前导梁支腿120或者多功能台车150的移动,也不会被前导梁支腿120或者多功能台车150阻碍。
前悬架结构包括导梁起升架和设置于导梁起升架上的卷扬机,当中导梁支腿130通过中轮系由导梁主梁110或前悬架结构中的一个的底面移动至前悬架结构与导梁主梁110的交界处时,卷扬机能够带动中导梁支腿130做上升或下降运动,以使中导梁支腿130移动至由导梁主梁110或前悬架结构中的另一个的底面。例如,当中导梁支腿130沿导梁主梁110的底面移动至前悬架结构与导梁主梁110的交界处时,卷扬机工作,并且带动中导梁支腿130做上升运动,使中导梁支腿130能够向上移动至导梁起升架上,并最终移动至导梁起升架的前端。当中导梁支腿130反方向移动时,其原理相同,在此不做赘述。
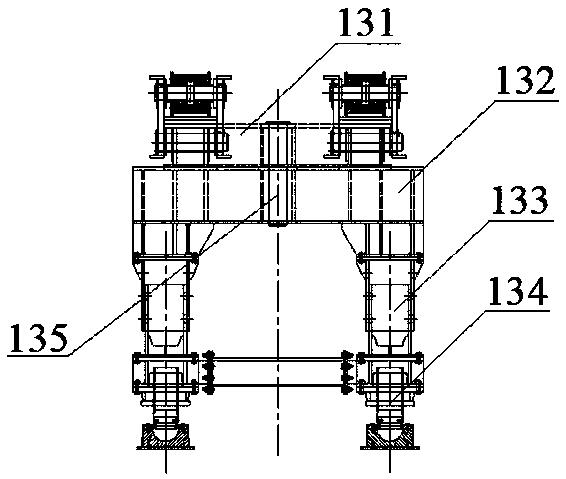
如图7所示,中导梁支腿130包括沿竖直方向由上至下依次连接的中上节柱、中中节柱133和中下节柱134。中中节柱133可沿竖直方向相对于中上节柱移动。中下节柱134位于中导梁支腿130的底端,中下节柱134可向导梁主梁110的底面翻转。同时,中中节柱133和中下节柱134还能够相对于中上节柱旋转以改变中中节柱133和中下节柱134与导梁主梁110在水平方向的夹角。
具体地,中上节柱用于与导梁主梁110连接,起到将中导梁支腿130与导梁主梁110连接的作用。中中节柱133与中上节柱滑动连接,起到支撑导梁主梁110的作用,用于承担运梁机200过孔重载。中中节柱133与中上节柱之间设有竖直设置的中滑动液压油缸,使中中节柱133能够沿竖直方向移动,以使中中节柱133能够相对于中上节柱在其长度方向上进行相对运动,使中导梁支腿130能够整体伸长或缩短,满足对中导梁支腿130不同长度的需求。
同时,中上节柱还能够带动中中节柱133和中下节柱134旋转,以便根据曲线架桥时的具体情况调整导梁机100就位。具体地,中上节柱包括中节连接部131和中节旋转部132,中节连接部131与中节旋转部132旋转连接,中节连接部131与导梁主梁110连接,中节旋转部132与中中节柱133连接。在本实用新型实施例中,中节连接部131和中节旋转部132可以通过中节转轴135连接。
中下节柱134包括两个中下节单元,每个中下节单元分别沿导梁主梁110的宽度方向设置,并且分别与中中节柱133的底部铰接连接。在本实用新型的一个实施例中,中下节单元可以分别与中节旋转部132铰接连接。两个中下节单元能够分别沿导梁主梁110的长度方向向导梁主梁110的底面翻转90°,以使中下节单元具有竖直或者水平两个状态,即中下节单元相对于导梁主梁110有垂直或平行于导梁主梁110两个状态,以能够使中导梁支腿130的整体长度进一步伸长或缩短,满足不同架梁高度的需求。
中轮系包括中导向轮、中反挂轮和中支撑轮,中导向轮、中反挂轮和中支撑轮分别设置于中导梁支腿130顶部,具体地,可以分别设置于中上节柱的顶部。
其中,中反挂轮用于将中导梁支腿130与中支腿导轨连接,能够起到防倾覆的作用。中反挂轮连接有电机,为中反挂轮提供动力,使中反挂轮能够带动中导梁支腿130沿在中支腿导轨上移动。中导向轮与中支腿导轨底面平行地位于中支腿导轨中,并且中导向轮的直径与中支腿导轨的宽度相同,使中导向轮能够根据中支腿导轨的轨迹引导中导梁支腿130移动。中支撑轮位于中上节柱与导梁主梁110的底面之间,以支撑导梁主梁110,能够起到支撑导梁主梁110纵移过孔的作用。
如图8-9所示,前导梁支腿120包括环抱机构121、左右滑动横梁122和上下滑动柱123。其中,前导梁支腿120通过环抱机构121于导梁主梁110可移动连接,使前导梁支腿120可沿导梁主梁110的长度方向移动。左右滑动横梁122可沿水平方向移动地与环抱机构121连接,能够带动上下滑动柱123沿导梁主梁110的宽度方向移动。上下滑动柱123设置于左右滑动横梁122的两端,并且能够沿竖直方向滑动,以使上下滑动柱123能够伸出或收回导梁主梁110的底面。当上下滑动柱123伸出导梁主梁110的底面时,能够支撑导梁主梁110;当上下滑动柱123收回导梁主梁110的底面时,能够防止其由于接触地面或其他障碍物而阻碍运梁机200运输导梁机100。
前导梁支腿120还包括前轮系,环抱机构121套设于导梁主梁110上,并且通过前轮系与导梁主梁110可移动连接。前轮系包括前承重轮126、前行走轮124和前反挂轮125;前行走轮124设置于环抱机构121与导梁主梁110的顶面之间,前行走轮124组连接驱动机构,用于带动环抱机构121移动。前反挂轮125将环抱机构121与导梁主梁110可移动连接,起到防倾覆作用。导梁主梁110的顶部两侧设有凸缘,前承重轮126设置于环抱机构121与凸缘的底面之间,起到承重作用。
环抱机构121的顶部设有环抱支架,左右滑动横梁122可沿导梁主梁110宽度方向移动地穿设于环抱支架中,能够通过前横移液压油缸的驱动,使左右滑动横梁122可以沿导梁主梁110宽度方向水平移动,从而使上下滑动柱123可沿导梁主梁110的宽度方向同步移动,以满足桥梁弯曲段的架梁需求。
上下滑动柱123分别滑动连接与左右滑动横梁122两端,且上下滑动柱123可沿竖直方向相对于左右滑动横梁122移动。同时,两根上下滑动柱123之间的距离大于中导梁支腿130的最大宽度,以使中导梁支腿130能够自由地穿过前导梁支腿120,在中导梁支腿130和前导梁支腿120运动时,不会相互阻碍。在本实用新型实施例中上下滑动柱123与左右滑动横梁122可通过前竖移液压油缸连接,并且驱动上下滑动柱123沿竖直方向伸出或收回导梁主梁110的底面,以满足架梁时不同高度的需求。
在本实用新型实施例中,上下滑动柱123的底端设有前支撑底座,前支撑底座的底部最大宽度小于上下滑动柱123之间的宽度,从而保证前导梁支腿120的底部能够完全支撑于待架设的桥墩上,防止由于上下滑动柱123之间距离大于待架设的桥墩的宽度,而导致前导梁支腿120无法在待架设的桥墩上可靠地支撑导梁主梁110。
如图10-11所示,后导梁支腿140沿竖直方向由上至下依次包括后固定节141、后滑动节142和后下节柱143。其中,后滑动节142能够带动后下节柱143沿竖直方向相对于后固定节141滑动,以使后导梁支腿140能够整体伸长或者缩短,满足对后导梁支腿140不同长度的需求。后下节柱143能够向导梁主梁110的底面翻转(具体地,朝向中导梁支腿130的方向翻转),即后下节柱143相对于导梁主梁110有垂直或平行于导梁主梁110两个状态,以能够使后导梁支腿140的整体长度进一步伸长或缩短,满足不同架梁高度的需求。
具体地,后固定节141的顶端通过导梁固定轴144与导梁主梁110连接,使后固定节141能够以导梁固定轴144为轴线转动,以使后导梁支腿140能够回收至平行设置于导梁主梁110的后端,方便导梁主梁110向前或向后移动,而不与地面或其他障碍物发生阻碍。
后导梁支腿140还包括后滑动节142,后滑动节142与后固定节141滑动连接,且后滑动节142能够沿后固定节141长度方向相对于后固定节141移动。具体地,后滑动节142通过后滑动液压油缸与后固定节141连接,使后滑动节142能够相对于后固定节141沿其长度方向移动。
后下节柱143设置于后滑动节142底部,并且后下节柱143能够向导梁主梁110的底面翻转。具体地,后下节柱143设置于所述后滑动节142底部且与后滑动节142转动连接。在本实用新型实施例中,后下节柱143与后滑动节142可以铰接。因此,使后下节柱143可以折起,即后下节柱143可向导梁主梁110的地面翻转,以便调整导梁机100高度,实现隧道口的低位架梁或者无隧道情况的高位架梁。
需要说明的是,当本实用新型实施例的运架一体机处于曲线架桥工况时,能够以中导梁支腿130为支点,通过控制中导梁支腿130的中下节柱134和中中节柱133与导梁主梁110之间相对转动,从而改变中下节柱134的底端与导梁主梁110之间的角度,使导梁主梁110的后端的后导梁支腿140可以位于对应的待架设的桥墩的正上方。并且通过控制前导梁支腿120的左右滑动横梁122沿导梁主梁110的宽度方向移动,以改变上下滑动柱123的位置,使上下滑动柱123位于对应的待架设的桥墩的正上方。从而使导梁机100能够根据曲线架桥时的具体情况调整导梁机100就位。
在本实用新型实施例中,前导梁支腿120、中导梁支腿130和后导梁支腿140能够带动导梁主梁110升高或降低,以使导梁主梁110处于高位工位或者低位工位。为了能够保证导梁主梁110能够可靠地进行高度调节,如图12所示,导梁主梁110的后端设有千斤顶支架160,当导梁主梁110在高位工位或者低位工位之间转换时,千斤顶支架160能够支撑千斤顶,以配合导梁主梁110调节高度。
在本实用新型的一个实施例中,千斤顶支架160与导梁主梁110可拆卸连接。在本实用新型的另一个实施例中,千斤顶支架160与导梁主梁110可移动连接,且能够沿导梁主梁110的长度方向伸出或缩回导梁主梁110的后端。在本实用新型的又一个实施例中,千斤顶支架160与导梁主梁110可旋转连接,以使千斤顶支架160能够伸出或缩回导梁主梁110的后端。
本实用新型实施例利用千斤顶支架160实现导梁机100的导梁主梁110的高度调节的具体方法为:
当导梁主梁110的高度需要降低时,千斤顶支架160伸出导梁主梁110的后端,并且支撑于千斤顶上。中导梁支腿130的中下节柱134向上翻转,后导梁支腿140的后下节柱143柱向上翻转。千斤顶和前导梁支腿120同时下降,以使中导梁支腿130和后导梁支腿140支撑于待架设的桥墩上。此时,可以拆卸千斤顶,将千斤顶支架160收回导梁主梁110的后端,从而完成导梁主梁110由高位工位向低位工位的切换。当导梁主梁110的高度需要升高时,其原理相同,在此不再赘述。
在本实用新型实施例中,由于伸缩式运梁支腿240能够沿其长度方向伸长或缩短,前导梁支腿120和中导梁支腿130能够沿导梁主梁110的长度方向移动,后导梁支腿140能够沿导梁主梁110的长度方向翻转,因此,伸缩式运梁支腿240、前导梁支腿120、中导梁支腿130和后导梁支腿140能够配合实现导梁机100在各个待架设的桥墩之间移动,仅通过运梁机200和导梁机100即可实现导梁机100在各个待架设的桥墩之间移动,无需增加辅助设备使导梁机100移动至架梁工位。
在本实用新型实施例中,导梁机100还包括多功能台车150,多功能台车150可移动地设置于导梁主梁110上,多功能台车150可沿导梁主梁110的长度方向与导梁主梁110做相对移动,用于驱动导梁主梁110移动或带动运梁机200移动。
如图13所示,多功能台车150包括多个小车151和整体式车架152,小车151分别沿导梁主梁110的长度方向设置并且与导梁主梁110连接,小车151分别连接于整体式车架152的顶部内侧。具体地,小车151分别与导梁主梁110可移动连接,小车151可沿导梁主梁110的长度方向移动,每两个相邻的小车151之间通过销轴连接,小车151分别通过台车升降油缸连接于整体式车架152的顶部内侧,使整体式车架152能够沿竖直方向上升或下降。
在本实用新型实施例中,整体式车架152两侧设有用于带动运梁机200移动的支撑平台153。由于前导梁支腿120、中导梁支腿130和后导梁支腿140能够带动导梁主梁110和多功能台车150同步做升降运动,以使导梁主梁110和多功能台车150处于高位工位或者低位工位。当导梁主梁110和多功能台车150处于低位工位时,为了保证支撑平台153的整体高度不变,即保证运梁机200的前行车系统所处的高度不变,支撑平台153上设置有台车支撑架。
在本实用新型实施例中,整体式车架152与导梁主梁110之间设有相对移动机构,用于驱使多功能台车150与导梁主梁110做相对移动。即当多功能台车150位置固定时,多功能台车150能够驱动导梁主梁110移动;当导梁主梁110位置固定时,多功能台车150能够在导梁主梁110上移动。
在本实用新型一个实施例中,相对移动机构包括设置于导梁主梁110上的导梁链条和设置于靠近导梁主梁110的前端的小车151顶部的中位驱动器;中位驱动器包括车架链轮和中位驱动电机,导梁链条与车架链轮配合连接,中为驱动电机可以为液压马达和减速机,液压马达驱动减速机,并通过减速机驱动车架链轮带动导梁链条,以使多功能台车150与导梁主梁110做相对运动。
在本实用新型另一个实施例中,相对移动机构包括设置于导梁主梁110上的导梁齿条和设置于靠近导梁主梁110的前端的小车151顶部的中位驱动器;中位驱动器包括车架齿轮和中位驱动电机,导梁齿条与车架齿轮配合连接,中位驱动电机驱动车架齿轮带动导梁齿条,以使多功能台车150与导梁主梁110做相对运动。
每个小车151分别通过对应的台车升降油缸可升降移动地连接于整体式车架152的顶部内侧。并且本实用新型的多功能台车150的整体式车架152可以上下移动,当需要根据不同的架梁工位的高度改变导梁及多功能台车150的高度时,可以对整体式车架152的高度进行调整,以配合运梁机200实现喂梁及落梁操作。
在本实用新型实施例中,小车151的数量为六个,由沿导梁主梁110的前端至后端的方向,依次包括一个第一小车151,三个第二小车151和两个第三小车151。导梁主梁110的两侧表面分别设有引导小车151移动的小车151轨道。如图14所示,第一小车151、第二小车151和第三小车151分别包括小车横梁151-1和小车滑块151-2,小车滑块151-2分别设置于小车横梁151-1的两端,并且通过小车反抓轮151-3连接于小车151轨道内,以实现小车151相对于导梁主梁110的移动。第一小车151与第二小车151结构相似,由于中位驱动器设置于第一小车151的顶部,因此其区别仅为:在第一小车151的顶端安装中位驱动器时,为了能够提高中位驱动器的高度,第一小车151的小车横梁151-1高度高于第二小车151。第三小车151与第一小车151和第二小车151的区别在于,第三小车151的顶端还设有用于与运梁机200连接的结构。
多功能台车150顶部设有台车悬挂机构154,台车连接机构250与台车悬挂机构154配合,以使多功能台车150悬挂于运梁机200的运梁主梁210下方,以便运梁主梁210装载导梁主梁110。台车悬挂机构154通过台车挂架与多功能台车150连接,台车挂架可沿竖直方向伸长或缩短,并带动多功能台车150远离或靠近运梁主梁210。如图15所示,台车悬挂机构154的数量为两个,两个台车悬挂机构154分别通过台车挂架与多功能台车150的靠近导梁主梁110后端的两个小车151(即两个第三小车151)的顶部连接,台车挂架包括沿竖直方向由上至下依次连接的伸缩挂架154-1、第一调节段154-2和第二调节段154-3,第二调节段154-3可移动地穿设于第一调节段154-2内,第一调节段154-2可移动地穿设于伸缩挂架154-1内,伸缩挂架154-1与台车悬挂机构154固定连接。具体地,第一调节段154-2和第二调节段154-3能够分别由对应的调节段液压油缸驱动,以使第二调节段154-3能够伸出或收回至第一调节段154-2、第一调节段154-2能够伸出或收回至伸缩挂架154-1。当运梁主梁210沿竖直方向上下移动时,台车挂架可以进行伸缩,以在运梁机200的运梁主梁210进行升降运动时,保持导梁机100的导梁主梁110和多功能小车151的高度不变,用于满足高位架梁、隧道出口架梁和隧道入口架梁不同的高度需求。具体地,高位架梁时第一调节段154-2全部完全伸出伸缩挂架154-1,第二调节段154-3不伸出第一调节段154-2,隧道出口架梁时第一调节段154-2和第二调节段154-3完全伸出,隧道入口架梁时第一调节段154-2和第二调节段154-3全部收回。
在本实用新型实施例中,多功能台车150的顶部还设有台车挂梁151-4和台车顶梁151-5,台车挂梁151-4连接于台车挂架的底部,台车顶梁151-5沿竖直方向相对于台车挂架移动地设置于台车挂架和多功能台车150之间。具体地,如图16所示,台车挂梁151-4和台车顶梁151-5分别为两个,一个台车挂梁151-4和一个对应的台车顶梁151-5设置为一组,两组台车挂梁151-4和台车顶梁151-5分别固定于靠近导梁主梁110后端的两个小车151(即两个第三小车151)的顶部。台车挂梁151-4的顶端设有挂梁悬挂部,台车挂梁151-4通过挂梁悬挂部挂吊于台车挂架的底部的吊梁上。台车顶梁151-5位于小车151顶面与台车挂架之间,当台车连接机构250与台车悬挂机构154连接,多功能台车150吊设于运梁主梁210下方,伸缩挂架154-1受力之后,台车顶梁151-5将台车挂梁151-4顶紧,从而使台车挂梁151-4和台车顶梁151-5保持锁死状态于台车挂架的底部的吊梁上。
下面,根据图17-31所示,以将导梁机安装于架梁工位的方法为例,对采用了本实用新型实施例的运架一体机的操作方法进行说明。
当导梁机100被运梁机200运输至架梁工位320附近时,导梁机100的中导梁支腿130悬挂于导梁主梁110前端的前悬挂装置170的底面,导梁机100的多功能台车150紧靠运梁机200的前行走系统220设置,导梁机100的前导梁支腿120靠近多功能台车150设置,导梁机100的后导梁支腿140水平设置于导梁主梁110的后端。此时,运梁机200与导梁机100配合,将导梁机100安装于架梁工位320的具体方法包括如下步骤:
S1、驱动导梁机100的导梁主梁110移动,使导梁主梁110的前端移动至靠近运梁机200的第二个待架设的桥墩330上方,并且导梁机100的中导梁支腿130支撑于第二个待架设的桥墩330。其中,驱动导梁主梁110移动时,导梁主梁110始终穿设于运梁机200的前行走系统220内,以保持导梁主梁110水平设置,防止导梁机100的后端上倾,使导梁主梁110始终处于水平状态。
在本实用新型实施例中,驱动导梁主梁110移动的方法为利用导梁机100的多功能台车150驱动导梁主梁110沿导梁主梁110的长度方向移动。
首先,如图17所示,多功能台车150通过其相对移动机构驱动导梁主梁110向前移动,使导梁主梁110的前端伸入架梁工位320(即伸出靠近运梁机200的第一个待架设的桥墩350)。此时,前悬挂装置170的卷扬机将中导梁支腿130由前悬挂装置170的导梁起升架放下,使中导梁支腿130位于导梁主梁110的前端下方。然后,如图18所示,多功能台车150继续驱动导梁主梁110向前移动至导梁主梁110移动至刚好完全覆盖架梁工位320(即导梁主梁110的前端移动到第二个待架设的桥墩330上方),同时中导梁支腿130向后移动,保证中导梁支腿130相对于运梁机200的位置不变。此时,如图19所示,中导梁支腿130沿导梁主梁110的长度方向向前移动至第二个待架设的桥墩330的位置,中导梁支腿130的中中节柱133向下伸出,使中下节柱134支撑于第二个待架设的桥墩330上。
S2、继续驱动导梁机100的导梁主梁110移动,使导梁主梁110的前端继续移动至第二个待架设的桥墩330和靠近运梁机200的第三个待架设的桥墩340之间。其中,如图20所示,导梁主梁110的前端移动到架梁工位320之间(即第二个待架设的桥墩330和第三个待架设的桥墩340之间)。
S3、多功能台车150沿导梁主梁110向前移动,使多功能台车150的整体式车架152后端与搭载运梁机200的桥面310的前端相接。
具体地,如图21所示,前导梁支腿120和多功能台车150同步地沿导梁主梁110向导梁主梁110的前端移动,以使前导梁支腿120移动至中导梁支腿130的前端,多功能台车150移动至其整体式车架152的后端紧靠搭载运梁机200的桥面310的位置。
S4、整体式车架152向下移动,使整体式车架152的支撑平台153的顶面与桥面平齐。
具体地,如图22所示,多功能台车150的整体式车架152相对于搭载运梁机200的桥面310向下移动,以使整体式车架152的两侧的支撑平台153的顶面与搭载运梁机200桥面的表面平齐。
S5、驱动导梁主梁110移动,使导梁主梁110的前端移动至第三个待架设的桥墩340上,并且导梁机100的前导梁主梁110移动并支撑于第三个待架设的桥墩340。
首先,如图23所示,运梁机200向前移动,使运梁机200的前行走系统220的前端与桥面的前端对齐(即与多功能台车150的整体式车架152的后端贴合)。然后,如图24所示,多功能台车150继续驱动导梁主梁110向前移动,使导梁主梁110的前端移动至第三个待架设的桥墩340上。同时,中导梁支腿130相对于导梁主梁110向后移动,使中导梁支腿130保持支撑于第二个待架设的桥墩330上。此时,如图25所示,前运梁支腿沿导梁主梁110向前移动至第三个待架设的桥墩340的位置,并且前导梁主梁110的上下滑动柱123向下伸出,使前导梁主梁110支撑于第三个待架设的桥墩340上。
S6、运梁机200的前行走系统220移动至支撑平台153上,并且由多功能台车150带动运梁机200沿导梁主梁110向前移动,使运梁机200的伸缩式运梁支腿240支撑于第二个待架设的桥墩330。其中,多功能台车150带动运梁机200沿导梁主梁110向前移动时,运梁机200的台车连接机构250与台车悬挂结构连接。
具体地,如图26所示,多功能台车150带动运梁机200向前移动,以使多功能台车150和前行走系统220位于第二个待架设的桥墩330的前端,同时使伸缩式运梁支腿240到第二个待架设的桥墩330的位置。此时,如图27所示,伸缩式运梁支腿240的二级运梁支腿242向下伸出,使伸缩式运梁支腿240支撑于第二个待架设的桥墩330上。
S7、驱动导梁主梁110移动,使导梁主梁110的后端与桥面的前端相接,并且导梁机100的后导梁支腿140支撑于靠近运梁机200的第一个待架设的桥墩350,以完成将导梁机100安装于架梁工位320。
在本实用新型实施例中,后导梁支腿140支撑于第一个待架设的桥墩350的方法包括:
S71、驱动导梁主梁110移动,使导梁主梁110的后端移动至与桥面的前端之间的距离大于后导梁支腿140的长度。
S72、后导梁支腿140向下翻转使其竖直设置。
S73、驱动导梁主梁110移动,使后导梁支腿140位于第一个待架设的桥墩350的位置,并且支撑于第一个待架设的桥墩350上。
具体地,如图28所示,多功能台车150驱动导梁主梁110继续向前移动,使导梁主梁110的后端远离搭载运梁机200的桥面310的前端。当导梁主梁110的后端与搭载运梁机200的桥面310的前端之间的距离大于后导梁支腿140的长度时,如图29所示,旋转后导梁支腿140,使后导梁支腿140竖直设置于导梁主梁110的下方。然后,如图30所示,多功能台车150驱动导梁主梁110向后移动,使后导梁支腿140位于第一个待架设的桥墩350的位置,此时,后导梁支腿140的后滑动节142向下伸出,使后导梁支腿140支撑于第一个待架设的桥墩350上。
在本实用新型实施例中,将导梁机100安装于架梁工位320后,还包括:
S8、多功能台车150沿导梁主梁110向后移动至整体式车架152后端与搭载运梁机200的桥面310的前端相接。如图31所示,能够方便运梁机200向后移动离开导梁机100,并运行至梁场运输箱梁。
最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
价值度评估
技术价值
经济价值
法律价值
0 0 058.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:58.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个实施例】、【1 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间8 年】专利权的维持时间越长,其价值对于权利人而言越高。
技术价值 31.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
7 个月独立权利要求数量
1 个从属权利要求数量
9 个说明书页数
13 页实施例个数
1 个发明人数量
18 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
1 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 8.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
2申请人类型
企业许可备案
0 次权利质押
0 次权利转移
0 个海关备案
否法律价值 19.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
8法律状态
无权-未缴年费







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...