
【中国发明,中国发明授权】一种智能机器人辅助快速建模与3D打印装置
有权-审定授权 中国
- 申请号:
- CN201610828816.2
- 专利权人:
- 四川大学
- 授权公告日/公开日:
- 2018.05.25
- 专利有效期:
- 2016.09.19-2036.09.19
- 技术分类:
- B29:塑料的加工;一般处于塑性状态物质的加工
- 转化方式:
- 转让
- 价值度指数:
-
- 56.0分
- 价格:
- 面议
发布人
知识产权运营中心
联系人IP先生
-

- 15113831943
-

- 9411117419@qq.com
-

- 941117419
-

- szhf1188(加微信)
-

- 深圳市南山区粤海街道100号
- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201610828816.2
- 申请日
- 20160919
- 公开/公告号
- CN106313513A
- 公开/公告日
- 20170111
- 申请/专利权人
- [四川大学]
- 发明/设计人
- [高文翔, 杨亚茹, 姚进]
- 主分类号
- B29C64/393
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 四川(51)
- 颁证日
- G06T1/00
- 代理人
摘要
本发明提出了一种智能机器人辅助快速建模与3D打印装置,该装置相比之前所提出的一些装置,具有更智能的特性,对比传统的反求工程,能够省去了大量不必要的工作,提高了加工效率,通过图像处理系统和关节控制系统,可以实时监测控制加工过程,提高了加工精度,移动平台可以实现全方位的移动与避障的功能,温度控制系统可以实时监测加工温度,提高表面加工质量,供料控制系统用于计算模型的打印所需的打印材料是否充足,并给出相应的提示,整个3D打印装置采用模块化的设计,使得制造,维护,维修与更换都比较方便。
法律状态
| 法律状态公告日 | 20180525 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
| 法律状态公告日 | 20180522 |
| 法律状态 | 著录事项变更 |
| 法律状态信息 | 著录事项变更 IPC(主分类):B29C 64/393 变更事项:发明人 变更前:高文翔 杨亚茹 姚进 变更后:杨亚茹 姚进 高文翔 |
| 法律状态公告日 | 20170208 |
| 法律状态 | 实质审查的生效 |
| 法律状态信息 | 实质审查的生效 IPC(主分类):B29C 64/393 申请日:20160919 |
| 法律状态公告日 | 20170111 |
| 法律状态 | 公开 |
| 法律状态信息 | 公开 |
权利要求
权利要求数量(4)
独立权利要求数量(1)
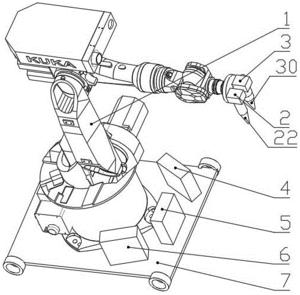
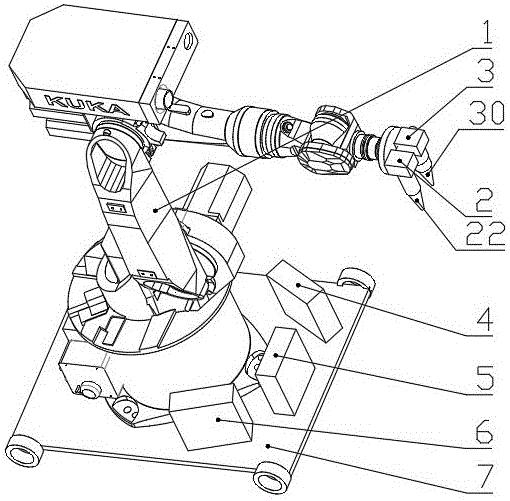
1.一种智能机器人辅助快速建模与3D打印装置,其特征在于,包括机器人(1)、3D打印 系统(2)、测量系统(3)、数据处理系统(4)、图像处理系统(5)、控制系统(6)、移动平台(7); 所述机器人(1)固定安装于移动平台(7)上;所述3D打印系统(2)固定安装于机器人(1)的工 具端,随机器人(1)的工具端同步运动;所述测量系统(3)固定安装于机器人(1)的工具端, 且与3D打印系统(2)的相对位置固定,并随机器人(1)的工具端同步运动;所述测量系统(3) 用于3D打印模型的快速建立;所述数据处理系统(4)固定安装于移动平台(7)上;所述图像 处理系统(5)固定安装于移动平台(7)上;所述控制系统(6)固定安装于移动平台(7)上;所 述移动平台(7)可在地面上任意的移动与旋转;
所述测量系统(3)用于模型的检测与测量,在所需3D打印模型参数未知的情况下,可以 进行快速的测量与建模,并在测量的过程中,通过数据处理系统(4)直接实现将模型空间几 何参数转换为机器人(1)的关节运动参数和3D打印系统(2)的打印参数,测量完成后便可直 接进行打印工作;该装置与之前所提出的“测量-反求建模-切片与参数设定-3D打印”的流 程相比较,直接实现 “反求建模与参数设定-3D打印”的过程,简化了3D打印流程;
所述数据处理系统(4)用于处理测量系统(3)所获得的数据,并转换为相应的机器人 (1)关节运动参数和3D打印系统(2)的打印参数;
所述图像处理系统(5)用于空间三维模型的建立;在测量系统(3)完成测量后的,利用 所获得的数据进行三维模型的建立;该建模可以精确的用于加工过程中的实时监测与控 制;
所述移动平台(7)可以实现整个3D打印装置的全方位移动,在3D打印模型较大超出机 器人(1)的可达范围时,移动平台(7)移动,从而实现机器人(1)的目标可达;在空间存在障 碍物时,移动平台(7)移动实现避障的功能。
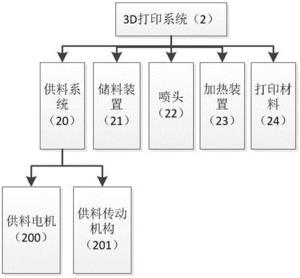
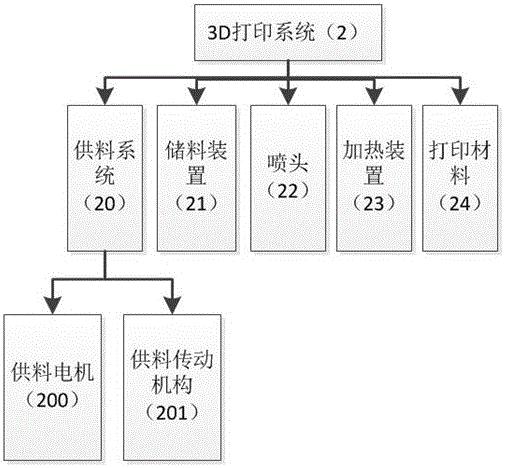
2.如权利要求1所述的一种智能机器人辅助快速建模与3D打印装置,其特征在于:所述 3D打印系统(2)进一步包括:供料系统(20)、储料装置(21)、喷头(22)、加热装置(23)、打印 材料(24);所述供料系统(20)进一步包括供料电机(200)、供料传动机构(201);所述供料电 机(200)带动供料传动机构(201)运动将打印材料(24)送入到加热装置(23)中进行加热,打 印材料(24)受热融化后通过喷头(22)挤出进行打印。
3.如权利要求1所述的一种智能机器人辅助快速建模与3D打印装置,其特征在于:所述 测量系统(3)进一步包括测量探头(30),测量探头可收缩;在开始测量时,测量探头伸长,进 行测量;在测量完成后,测量探头(30)便收回,不妨碍3D打印工作。
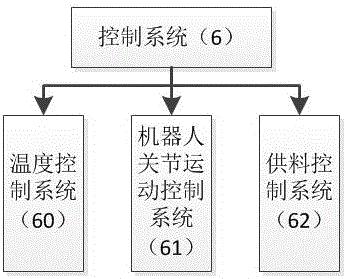
4.如权利要求1所述的一种智能机器人辅助快速建模与3D打印装置,其特征在于:所述 控制系统(6)进一步包括:温度控制系统(60)、机器人关节运动控制系统(61)、供料控制系 统(62);所述温度控制系统(60)用于实时监测与控制打印材料(24)在喷头(22)处的温度, 实现更高的表面加工质量;所述机器人关节运动控制系统(61)用于实时监测与控制机器人 (1)的运动状态并进行修正,实现实时反馈控制;所述供料控制系统(62)用于计算模型的打 印所需的打印材料(24)是否充足,并给出相应的提示。
说明书
技术领域
本发明涉及3D 打印技术领域,具体涉及一种智能机器人辅助快速建模与3D打印 装置。
背景技术
随着科技的飞速发展,3D打印技术与机器人技术的应用越来越广泛。随着德国工 业4.0的提出,这两项技术在各个行业的应用已经越来越普遍。3D打印技术是非常受重视 的,该技术的发展将直接推动制造业翻天覆地的变化。机器人在工业领域的应用也很广泛, 目前工业机器人的发展已经很成熟。工业机器人已经能够实现制造过程中的各种加工、装 配、搬运、喷涂等工作。这种应用大大的提高了生产效率,节约了生产花费。
从目前的应用来说,3D打印设备还是比较侧重于简单的三轴移动装置。虽然目前 已经提出了很多新的装置,但是实践的过程中还是比较复杂,加工精度不高,加工表面质量 较差。
针对目前所提出的装置的不足,本发明提出了一种智能机器人辅助快速建模与3D 打印装置,该方案的创新点有:
1.与传统的“反求建模-3D打印”过程中繁琐的“测量-反求建模-切片与参数设定-3D打 印”的流程对比,该装置在测量的过程中,便可直接实现参数设定,省去了大量不必要的工 作,提高了加工效率;
2. 通过图像处理系统和关节控制系统,可以实时监测控制加工过程,提高加工精度;
3. 移动平台可以实现全方位的移动与避障的功能,实现无碰撞3D打印,并在模型较大 或不在机器人可达范围内时,通过移动平台实现机器人目标可达,从而使得3D打印不受限 制;
4. 温度控制系统可以实时监测加工温度,提高表面加工质量;
5. 供料控制系统用于计算模型打印所需的打印材料是否充足,并给出相应的提示,更 加智能化;
6. 整个3D打印装置采用模块化的设计,使得制造,维护,维修与更换都比较方便;
7.该装置也可实现传统的三维打印流程,由于装置带有检测与控制系统,能实现加工 过程的实时控制,故加工质量、加工精度都比较高。
发明内容
本发明提出一种智能机器人辅助快速建模与3D打印装置。该装置克服了现有装置 的不足,具有更智能化的特点。
本发明是通过下述技术方案来实现的:
一种智能机器人辅助快速建模与3D打印装置,其特征在于,包括机器人(1)、3D打印系 统(2)、测量系统(3)、数据处理系统(4)、图像处理系统(5)、控制系统(6)、移动平台(7);所 述机器人(1)固定安装于移动平台(7)上;所述3D打印系统(2)固定安装于机器人(1)的工具 端,随机器人(1)的工具端同步运动;所述测量系统(3)固定安装于机器人(1)的工具端,且 与3D打印系统(2)的相对位置固定,并随机器人(1)的工具端同步运动;所述测量系统(3)用 于3D打印模型的快速建立;所述数据处理系统(4)固定安装于移动平台(7)上;所述图像处 理系统(5)固定安装于移动平台(7)上;所述控制系统(6)固定安装于移动平台(7)上;所述 移动平台(7)可在地面上任意的移动与旋转;
所述测量系统(3)用于模型的检测与测量,在所需3D打印模型参数未知的情况下,可以 进行快速的测量与建模,并在测量的过程中,通过数据处理系统(4)直接实现将模型空间几 何参数转换为机器人(1)的关节运动参数和3D打印系统(2)的打印参数,测量完成后便可直 接进行打印工作;该装置与之前所提出的“测量-反求建模-切片与参数设定-3D打印”的流 程相比较,直接实现 “反求建模与参数设定-3D打印”的过程,简化了3D打印流程;
所述数据处理系统(4)用于处理测量系统(3)所获得的数据,并转换为相应的机器人 (1)关节运动参数和3D打印系统(2)的打印参数;
所述图像处理系统(5)用于空间三维模型的建立;在测量系统(3)完成测量后的,利用 所获得的数据进行三维模型的建立;该建模可以精确的用于加工过程中的实时监测与控 制;
所述移动平台(7)可以实现整个3D打印装置的全方位移动,在3D打印模型较大超出机 器人(1)的可达范围时,移动平台(7)移动,从而实现机器人(1)的目标可达;在空间存在障 碍物时,移动平台(7)移动实现避障的功能。
所述3D打印系统(2)进一步包括:供料系统(20)、储料装置(21)、喷头(22)、加热装 置(23)、打印材料(24);所述供料系统(20)进一步包括供料电机(200)、供料传动机构 (201);所述供料电机(200)带动供料传动机构(201)运动将打印材料(24)送入到加热装置 (23)中进行加热,打印材料(24)受热融化后通过喷头(22)挤出进行打印。
所述测量系统(3)进一步包括测量探头(30),测量探头可收缩;在开始测量时,测 量探头伸长,进行测量;在测量完成后,测量探头(30)便收回,不妨碍3D打印工作。
所述控制系统(6)进一步包括:温度控制系统(60)、机器人关节运动控制系统 (61)、供料控制系统(62);所述温度控制系统(60)用于实时监测与控制打印材料(24)在喷 头(22)处的温度,实现更高的表面加工质量;所述机器人关节运动控制系统(61)用于实时 监测与控制机器人(1)的运动状态并进行修正,实现实时反馈控制;所述供料控制系统(62) 用于计算模型的打印所需的打印材料(24)是否充足,并给出相应的提示。
本发明所述的一种智能机器人辅助快速建模与3D打印装置用于“反求建模与参数 设定-3D打印”过程中的工作原理为:所述测量装置进行模型的尺寸测量,测量所得的结果 送入到数据处理系统中进行数据的处理;数据处理系统将所得的数据进行转换,根据测量 装置与3D打印装置的相对位置的固定,将测量点的数据转换为喷头工作点的数据,然后将 该参数进一步转换为机器人关节的运动参数和3D打印的相关参数;图像处理系统利用测量 所得的数据进行三维建模;控制系统控制机器人及3D打印装置工作,并实时监测控制;当加 热温度发生变化时,利用温度控制系统进行调节控制;当加工位置发生偏移时,机器人关节 运动控制系统修正相关的机器人关节转角信息;在机器人关节运动参数处理的过程中如果 发生与障碍物的碰撞,则可利用整个装置的冗余特性进行无碰撞的轨迹规划,从而避开障 碍物;当加工模型过大,或不在机器人可达范围内时,可利用移动平台,实现机器人目标可 达。
附图说明
图1是本发明的示意图。
图2是本发明的3D打印系统组成示意图。
图3是本发明的控制系统组成示意图。
附图中,各数字的含义为:1:机器人;2:3D打印系统;3:测量系统;4:数据处理系 统;5:图像处理系统;6:控制系统;7:移动平台;20:供料系统;21:储料装置;22:喷头;23加 热装置;24:打印材料;200:供料电机;201:供料传动机构;60:温度控制系统;61:机器人关 节运动控制系统;62:供料控制系统。
具体实施方式
下面结合附图及实施例进一步详述本发明,但本发明不仅限于所述实施例。
实施例一
本例的一种智能机器人辅助快速建模与3D打印装置,其特征在于,包括机器人(1)、3D 打印系统(2)、测量系统(3)、数据处理系统(4)、图像处理系统(5)、控制系统(6)、移动平台 (7);所述机器人(1)固定安装于移动平台(7)上;所述3D打印系统(2)固定安装于机器人(1) 的工具端,随机器人(1)的工具端同步运动;所述测量系统(3)固定安装于机器人(1)的工具 端,且与3D打印系统(2)的相对位置固定,并随机器人(1)的工具端同步运动;所述测量系统 (3)用于3D打印模型的快速建立;所述数据处理系统(4)固定安装于移动平台(7)上;所述图 像处理系统(5)固定安装于移动平台(7)上;所述控制系统(6)固定安装于移动平台(7)上; 所述移动平台(7)可在地面上任意的移动与旋转;
所述测量系统(3)用于模型的检测与测量,在所需3D打印模型参数未知的情况下,可以 进行快速的测量与建模,并在测量的过程中,通过数据处理系统(4)直接实现将模型空间几 何参数转换为机器人(1)的关节运动参数和3D打印系统(2)的打印参数,测量完成后便可直 接进行打印工作;该装置与之前所提出的“测量-反求建模-切片与参数设定-3D打印”的流 程相比较,直接实现 “反求建模与参数设定-3D打印”的过程,简化了3D打印流程;
所述数据处理系统(4)用于处理测量系统(3)所获得的数据,并转换为相应的机器人 (1)关节运动参数和3D打印系统(2)的打印参数;
所述图像处理系统(5)用于空间三维模型的建立;在测量系统(3)完成测量后的,利用 所获得的数据进行三维模型的建立;该建模可以精确的用于加工过程中的实时监测与控 制;
所述移动平台(7)可以实现整个3D打印装置的全方位移动,在3D打印模型较大超出机 器人(1)的可达范围时,移动平台(7)移动,从而实现机器人(1)的目标可达;在空间存在障 碍物时,移动平台(7)移动实现避障的功能。
实施例二
本例所述3D打印系统(2)进一步包括:供料系统(20)、储料装置(21)、喷头(22)、加热装 置(23)、打印材料(24);所述供料系统(20)进一步包括供料电机(200)、供料传动机构 (201);所述供料电机(200)带动供料传动机构(201)运动将打印材料(24)送入到加热装置 (23)中进行加热,打印材料(24)受热融化后通过喷头(22)挤出进行打印,其余同实施例一。
实施例三
本例所述测量系统(3)进一步包括测量探头(30),测量探头可收缩;在开始测量时,测 量探头伸长,进行测量;在测量完成后,测量探头(30)便收回,不妨碍3D打印工作,其余同实 施例一。
实施例四
本例所述控制系统(6)进一步包括:温度控制系统(60)、机器人关节运动控制系统 (61)、供料控制系统(62);所述温度控制系统(60)用于实时监测与控制打印材料(24)在喷 头(22)处的温度,实现更高的表面加工质量;所述机器人关节运动控制系统(61)用于实时 监测与控制机器人(1)的运动状态并进行修正,实现实时反馈控制;所述供料控制系统(62) 用于计算模型的打印所需的打印材料(24)是否充足,并给出相应的提示,其余同实施例一。
价值度评估
技术价值
经济价值
法律价值
0 0 056.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:56.0分
该专利价值中等 (仅供参考)
本专利文献中包含【4 个实施例】、【4 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间8 年】专利权的维持时间越长,其价值对于权利人而言越高。
技术价值 30.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
20 个月独立权利要求数量
1 个从属权利要求数量
3 个说明书页数
4 页实施例个数
4 个发明人数量
3 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
4 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 7.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
院校许可备案
0 次权利质押
0 次权利转移
0 个海关备案
否法律价值 19.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
8法律状态
有权-审定授权







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...