【中国实用新型】一种地面清扫装置
有权-审定授权 中国
- 申请号:
- CN202220885898.5
- 专利权人:
- 尚尔航
- 授权公告日/公开日:
- 2022.08.12
- 专利有效期:
- 2022.04.15-2032.04.15
- 技术分类:
- A47:家具;家庭用的物品或设备;咖啡磨;香料磨;一般吸尘器
- 转化方式:
- 许可
- 价值度指数:
-
- 51.0分
- 价格:
- ¥200000.00
发布人
尚尔航
联系人尚尔航
-

- 13826512660
-

- 1274868892@qq.com
-

- 1274868892
-

- shang_eh
-

- 广东省深圳市
- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN202220885898.5
- 申请日
- 20220415
- 公开/公告号
- CN217161991U
- 公开/公告日
- 20220812
- 申请/专利权人
- [尚尔航]
- 发明/设计人
- [尚尔航]
- 主分类号
- A47L11/24
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 广东(44)
- 颁证日
- G06T1/00
- 代理人
- [丁宇龙]
摘要
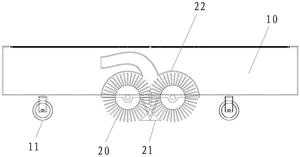
本实用新型提供了一种地面清扫装置,包括机身,机身的内部形成空心腔体,机身的下方设有用于支撑机身的行走轮;机身的底部设有两个平行设置的圆柱状的清扫轮,两个清扫轮的上方设有一个导流罩将两个清扫轮的上半部分罩住,导流罩导通至机身内部的空心腔体,两个清扫轮的中间下方设有一个用于对垃圾进行导流的楔体。本实用新型的有益效果在于:通过两个清扫轮,两个清扫轮之间用于导流的楔体,再加上导流罩来对地面进行清扫,清扫彻底,能效比较高、工作噪音小。
权利要求
权利要求数量(10)
独立权利要求数量(1)
1.一种地面清扫装置,其特征在于:包括机身,机身的内部形成空心腔体,机身的下方设有用于支撑机身的行走轮;机身的底部设有两个平行设置的圆柱状的清扫轮,两个清扫轮的上方设有一个导流罩将两个清扫轮的上半部分罩住,导流罩导通至机身内部的空心腔体,两个清扫轮的中间下方设有一个用于对垃圾进行导流的楔体。
2.如权利要求1所述的地面清扫装置,其特征在于:所述楔体与两个清扫轮相对的两个面设有下凹的弧度。
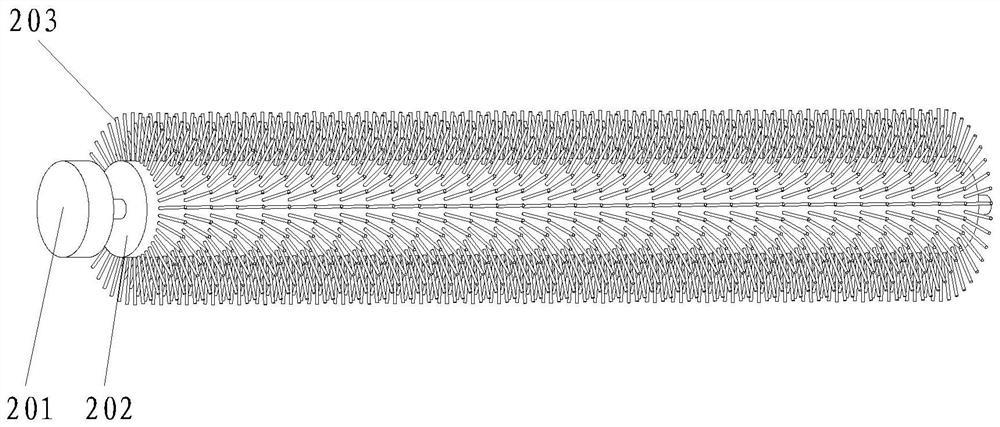
3.如权利要求1所述的地面清扫装置,其特征在于:所述清扫轮包括圆柱形的轴体,轴体的表面布满柔性线状体。
4.如权利要求3所述的地面清扫装置,其特征在于:两个清扫轮的柔性线状体部分重合。
5.如权利要求4所述的地面清扫装置,其特征在于:每个清扫轮的其中一端部设有驱动电机,驱动电机固定在机身上,驱动电机的输出轴与清扫轮的轴体固定连接。
6.如权利要求1所述的地面清扫装置,其特征在于:所述导流罩包括两个相连的半圆形壳体,两个半圆形壳体的中间连通一个弯曲的气流通道。
7.如权利要求1所述的地面清扫装置,其特征在于:所述机身包括圆形的壳体,圆形壳体上设有一个上盖。
8.如权利要求7所述的地面清扫装置,其特征在于:所述上盖的外边缘一圈设有若干个用于排气并过滤灰尘垃圾的细小圆孔。
9.如权利要求1所述的地面清扫装置,其特征在于:所述行走轮设有三个,三个行走轮均匀分布,三个行走轮之间形成一个稳定的三角形结构。
10.如权利要求9所述的地面清扫装置,其特征在于:三个行走轮中,前轮为万向轮,并通过电机驱动,两个后轮为从动轮,固定于机身底部。
说明书
技术领域
本实用新型涉及扫地机器人技术领域,尤其是指一种地面清扫装置。
背景技术
随着人民生活普遍提高,越来越多家庭选用了扫地机器人进行地面卫生清扫工作。目前主流扫地机器人的扫地机构原理为用电机带动两个圆盘清扫刷,两个清扫刷反方向转动,将灰尘集中于吸风口处,并通过吸尘电机带动涡轮产生的强大吸力,将灰尘从吸风口吸入到灰尘存储箱中。这种清扫机构仍存在不足之处,例如:
1、清扫不彻底,容易有残余灰尘或垃圾。受制于圆盘清扫刷清扫限制以及吸风口真空吸力限制,存在清扫不彻底情况。
2、能效比低。由于扫地机器人的吸尘电机需带动涡轮产生强大的真空吸力,因此吸尘电机要消耗较大功率;
3、工作噪音大。由于涡轮需要较高转速才能产生强大的真空吸力,由此带来了较大风噪。
发明内容
本实用新型所要解决的技术问题是:提供一种能有效提升清扫效率的地面清扫装置。
为了解决上述技术问题,本实用新型采用的技术方案为:一种地面清扫装置,包括机身,机身的内部形成空心腔体,机身的下方设有用于支撑机身的行走轮;机身的底部设有两个平行设置的圆柱状的清扫轮,两个清扫轮的上方设有一个导流罩将两个清扫轮的上半部分罩住,导流罩导通至机身内部的空心腔体,两个清扫轮的中间下方设有一个用于对垃圾进行导流的楔体。
进一步的,所述楔体与两个清扫轮相对的两个面设有下凹的弧度。
进一步的,所述清扫轮包括圆柱形的轴体,轴体的表面布满柔性线状体。
进一步的,两个清扫轮的柔性线状体部分重合。
进一步的,每个清扫轮的其中一端部设有驱动电机,驱动电机固定在机身上,驱动电机的输出轴与清扫轮的轴体固定连接。
进一步的,所述导流罩包括两个相连的半圆形壳体,两个半圆形壳体的中间连通一个弯曲的气流通道。
进一步的,所述机身包括圆形的壳体,圆形壳体上设有一个上盖。
进一步的,所述上盖的外边缘一圈设有若干个用于排气并过滤灰尘垃圾的细小圆孔。
进一步的,所述行走轮设有三个,三个行走轮均匀分布,三个行走轮之间形成一个稳定的三角形结构。
进一步的,三个行走轮中,前轮为万向轮,并通过电机驱动,两个后轮为从动轮,固定于机身底部。
本实用新型的有益效果在于:通过两个清扫轮加上导流罩及楔体的组合,使得本地面清扫装置在清扫地面时无死角,对于灰尘和一般垃圾均有较好的清扫效果;能效比较高、工作噪音小。传统的扫地机构,由于需要产生强大吸力,吸尘电机仍为主要耗能组件。本方案不采用吸尘电机,因此比较节能,由于没有高速旋转的真空涡轮,因此工作时噪音很小。
附图说明
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的机构获得其他的附图。
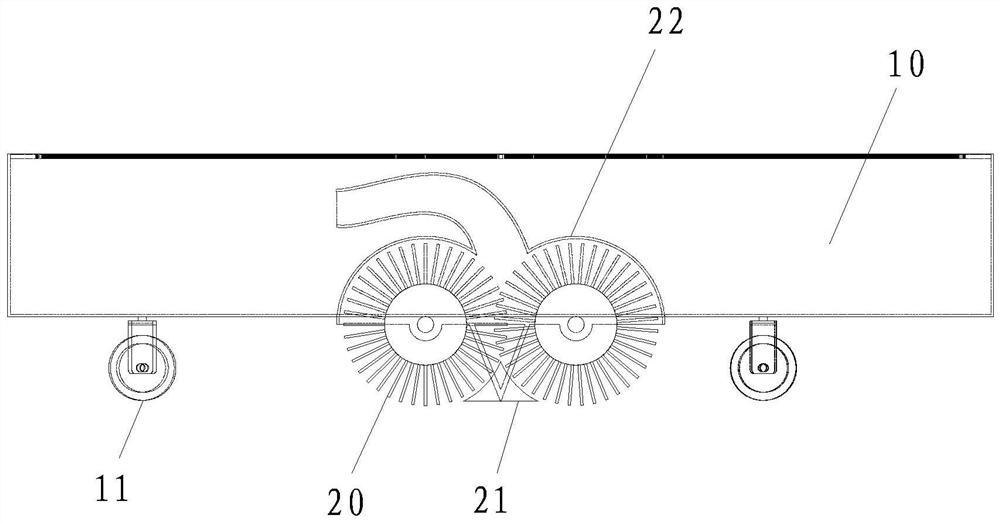
图1为本实用新型的地面清扫装置的透视图;
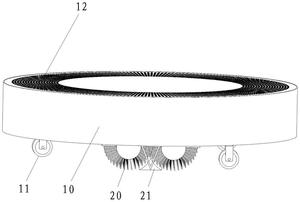
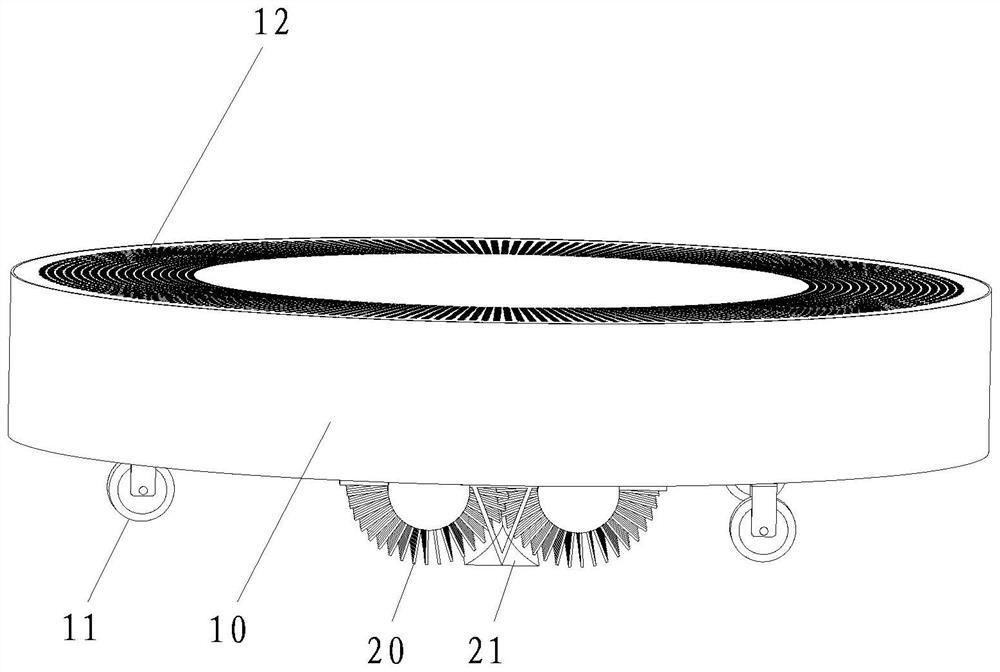
图2为本实用新型的地面清扫装置的立体示意图;
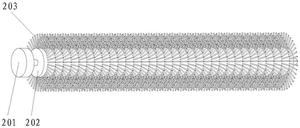
图3为本实用新型的地面清扫装置的清扫轮结构图;
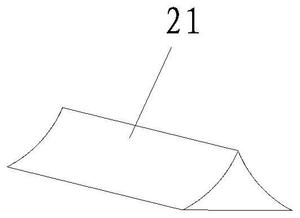
图4为本实用新型的地面清扫装置的楔体结构图;
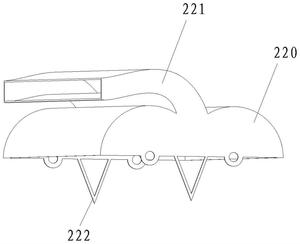
图5为本实用新型的地面清扫装置的导流罩结构图;
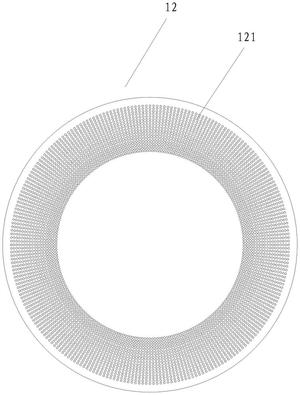
图6为本实用新型的地面清扫装置的上盖结构图;
其中,10-机身、11-行走轮、12-上盖、121-细小圆孔;20-清扫轮、201-驱动电机、202-轴体、203-柔性线状体、21-楔体、22-导流罩、220-半圆形壳体、221-气流通道、222-楔体固定架。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
需要说明,本实用新型中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
如图1、图2所示,本实用新型的第一实施例为:一种地面清扫装置,包括机身10,机身10的内部形成空心腔体,机身10的下方设有用于支撑机身10的行走轮11;机身10的底部设有两个平行设置的圆柱状的清扫轮20,两个清扫轮20的上方设有一个导流罩22将两个清扫轮20的上半部分罩住,导流罩22导通至机身10内部的空心腔体,两个清扫轮20的中间下方设有一个用于对垃圾进行导流的楔体21。
本实施例中,通过两个清扫轮20加上导流罩22及楔体21的组合,使得本地面清扫装置在清扫地面时无死角,对于灰尘和一般垃圾均有较好的清扫效果;能效比较高、工作噪音小。传统的扫地机构,由于需要产生强大吸力,吸尘电机仍为主要耗能组件。本方案不采用吸尘电机,因此比较节能,由于没有高速旋转的真空涡轮,因此工作时噪音很小。
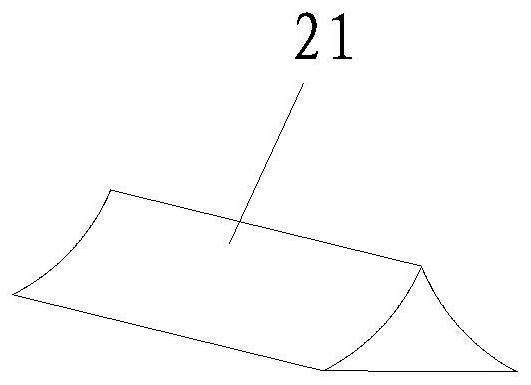
如图1,图4所示,在一具体实施例中,所述楔体21与两个清扫轮20相对的两个面设有下凹的弧度。
本实施例中,通过楔体21两个面的下凹弧度,能够在清扫轮20滚动清扫地面时,能够对灰尘及垃圾起到更好的导流作用,从而使得垃圾及灰尘能够更加快速地通过导流罩22进入到机身10内部的空心腔体。
如图1,图3所示,在一具体实施例中,所述清扫轮20包括圆柱形的轴体202,轴体202的表面布满柔性线状体203。
本实施例中,布满柔性线状体203能够使得清扫轮20的轴体202转动时,柔性线状体203与地面进行柔性接触。
如图1、图2所示,在一具体实施例中,两个清扫轮20的柔性线状体203部分重合。
本实施例中,两个清扫轮20之间的距离相对较近,使得两个清扫轮20的柔性线状体203部分穿插重合,在进行清扫时,两个清扫轮20反向旋转时,能够将垃圾夹住并继续加速,垃圾受惯性力及气流推动经导流罩22运送到机身10内部的空心腔体,能够提高清扫效率,获得更好的清扫效果。
如图1、图3所示,在一具体实施例中,每个清扫轮20的其中一端部设有驱动电机201,驱动电机201固定在机身10上,驱动电机201的输出轴与清扫轮20的轴体202固定连接。
本实施例中,每个清扫轮20由一个驱动电机201带动,带动两个清扫轮20反方向的向内旋转来实现对地面进行清扫。前行走轮11由电机驱动,电机由主控芯片控制,主控芯片能够控制地面清扫装置按照预定的轨迹来对地面进行清扫。
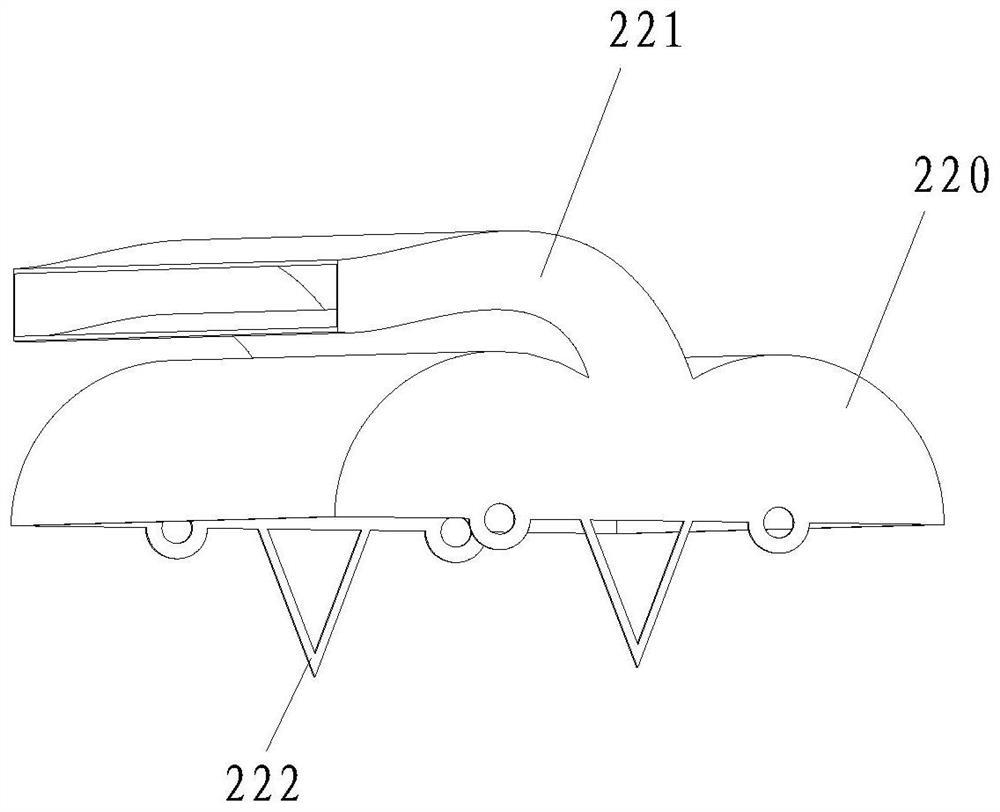
如图1、图5所示,在一具体实施例中,所述导流罩22包括两个相连的半圆形壳体220,两个半圆形壳体220的中间连通一个弯曲的气流通道221。
本实施例中,由于清扫轮20为圆柱状,导流罩22需要沿着清扫轮20的边缘将清扫轮20包裹,因此导流罩22需要做成半圆形壳体220,两个半圆形壳体220一体连接,两个半圆形壳体220的中间连接一个弯曲的气流通道221,使得清扫轮20清扫的垃圾或者灰尘能够沿着弯曲的气流通道221进入到机身10内部的空心腔体,导流罩22延伸出楔体固定架222连接固定楔体21。
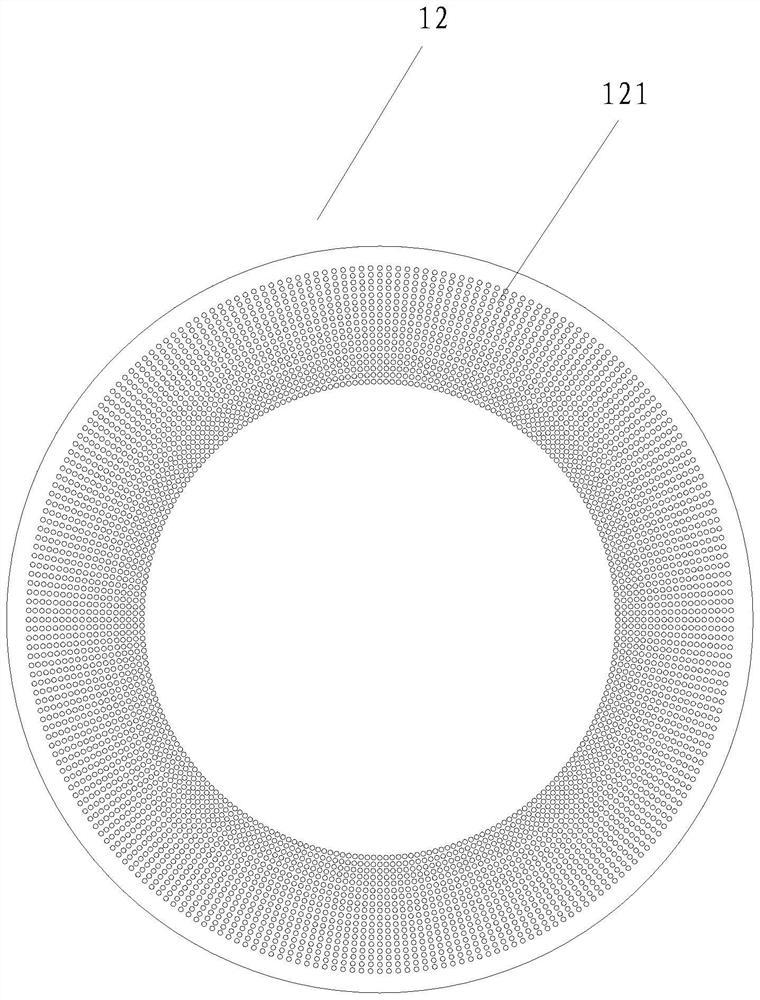
如图1、图6所示,在一具体实施例中,所述机身10包括圆形的壳体,圆形壳体上设有一个上盖12。
进一步的,所述上盖12的外边缘一圈设有若干个用于排气并过滤灰尘垃圾的细小圆孔121。
本实施例中,由于本方案是由机身10底部的清扫轮20将垃圾或者灰尘经导流罩22运送至机身10内部的空心腔体,清扫轮20高速转动时,会产生从机身10底部经导流罩22到达机身10内部的气流,因此需要在上盖12开设用于排气并过滤灰尘垃圾的细小圆孔121。
在一具体实施例中,所述行走轮11设有三个,三个行走轮11均匀分布,三个行走轮11之间形成一个稳定的三角形结构。
进一步的,三个行走轮11中,前轮为万向轮,并通过电机驱动,两个后轮为从动轮,固定于机身10的底部。
本实施例中,地面清扫装置的前行走轮由电机驱动,在主控芯片的控制下,能够实现固定轨迹的运动,让清扫轮实现地面自动清扫。设置三个行走轮形成一个稳定的三角形结构为一个最优方案,也可以根据实际情况设置四个轮或者五个轮。
以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
价值度评估
技术价值
经济价值
法律价值
0 0 051.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:51.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个实施例】、【2 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间2 年】专利权的维持时间越长,其价值对于权利人而言越高。
技术价值 30.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
3 个月独立权利要求数量
1 个从属权利要求数量
9 个说明书页数
4 页实施例个数
1 个发明人数量
1 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
2 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 6.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
个人许可备案
0 次权利质押
0 次权利转移
0 个海关备案
否法律价值 15.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
2法律状态
有权-审定授权






 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...