【中国实用新型】一种千足虫式爬楼机
有权-审定授权 中国
- 申请号:
- CN202322535563.8
- 专利权人:
- 付方安
- 授权公告日/公开日:
- 2024.04.09
- 专利有效期:
- 2023.09.19-2033.09.19
- 技术分类:
- B62:无轨陆用车辆
- 转化方式:
- 许可
- 价值度指数:
-
- 46.0分
- 价格:
- 面议
发布人
付方安
联系人付方安
-

- 13807055483
-

- 13807055483@163.com


-

- 江西南昌
- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN202322535563.8
- 申请日
- 20230919
- 公开/公告号
- CN220743212U
- 公开/公告日
- 20240409
- 申请/专利权人
- [付方安]
- 发明/设计人
- [付方安]
- 主分类号
- B62D57/024
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 江西(36)
- 颁证日
- G06T1/00
- 代理人
- [吴称生]
摘要
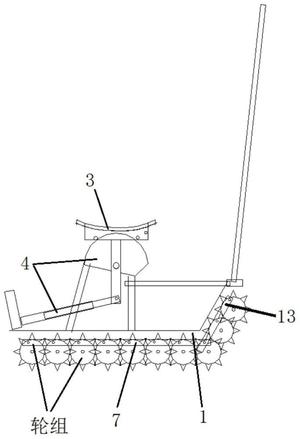
本实用新型公开了一种千足虫式爬楼机,包括固定平台,所述固定平台的前端设有倾斜板,固定平台和倾斜板排布多组轮组,轮组由动力机构驱动,轮组之间由传动连杆连接;本实用新型通过采用动力机构驱动轮组,轮组之间通过传动连杆相互带动,使得各个轮组旋转速度一致,保证了爬楼机爬楼时的稳定性,同时倾斜板因倾斜设置,保证爬楼机在从平面进入斜面时更加快速,大大提高了爬楼机的功能性,相对于传统爬楼机,采用连杆传动,造价更加低廉,实用性大大提高。
权利要求
权利要求数量(10)
独立权利要求数量(1)
1.一种千足虫式爬楼机,包括固定平台(1),其特征在于:所述固定平台(1)的前端设有倾斜板(13),固定平台(1)和倾斜板(13)排布多组轮组,轮组由动力机构驱动。
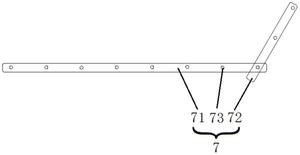
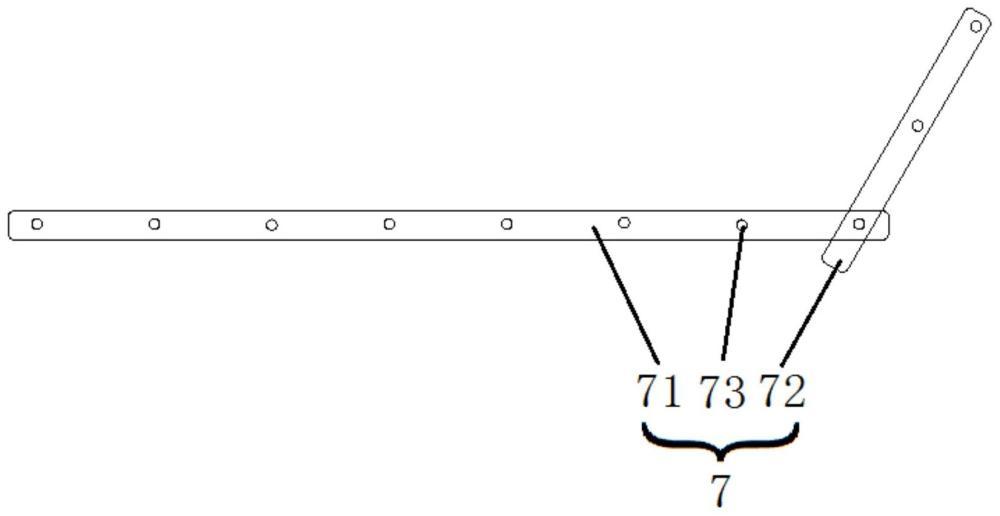
2.根据权利要求1所述的一种千足虫式爬楼机,其特征在于:所述轮组之间由传动连杆(7)连接,传动连杆(7)包括一根第一传动杆(71)以及一根第二传动杆(72),第二传动杆(72)的端头活动连接于第一传动杆(71)的端头上,所述第一传动杆(71)和第二传动杆(72)上设有多个依次等距排列的限位孔(73),轮组连接于第一传动杆(71)和第二传动杆(72)上的限位孔(73)上。
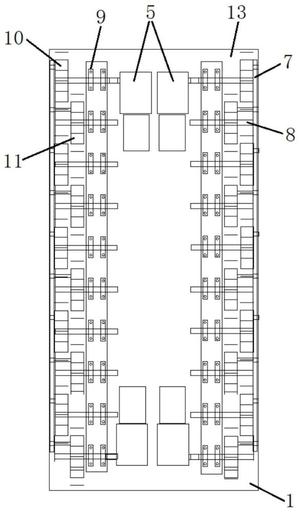
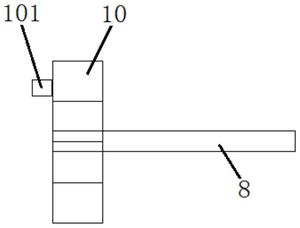
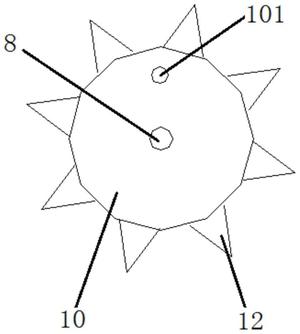
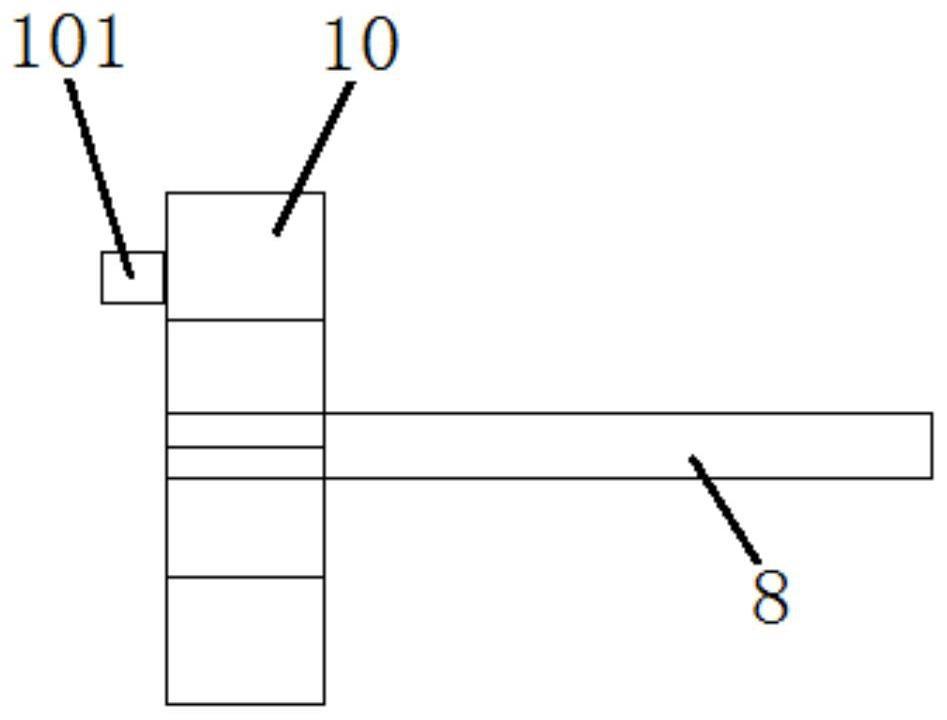
3.根据权利要求2所述的一种千足虫式爬楼机,其特征在于:所述轮组包括沿倾斜板(13)以及固定平台(1)底部设置的多个外边轮(10),所述外边轮(10)的外侧面设有第一连接杆(101),且第一连接杆(101)不处于外边轮(10)圆心位置处,处于同一轴线上的外边轮(10)均通过自身设置的第一连接杆(101)连接于第一传动杆(71)和第二传动杆(72)上的限位孔(73)内。
5.根据权利要求3或4所述的一种千足虫式爬楼机,其特征在于:所述外边轮(10)以及内边轮(11)和倾斜板(13)以及固定平台(1)底部连接处均设有轴承(9)以及配套的转轴(8)。
6.根据权利要求3或4所述的一种千足虫式爬楼机,其特征在于:所述动力机构包括设于倾斜板(13)以及固定平台(1)底部的多个蜗杆减速电机(5),处于倾斜板(13)以及固定平台(1)的外侧端头处的外边轮(10)上均通过转轴(8)连接有一个蜗杆减速电机(5)。
8.根据权利要求3或4所述的一种千足虫式爬楼机,其特征在于:所述外边轮(10)以及内边轮(11)的表面均设有环绕式等距分布的轮足(12)。
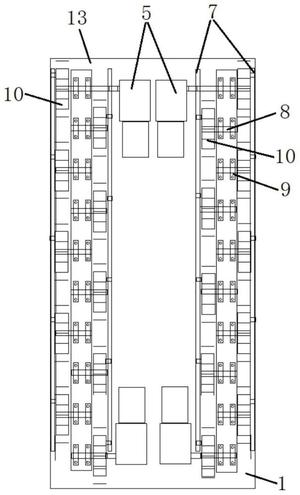
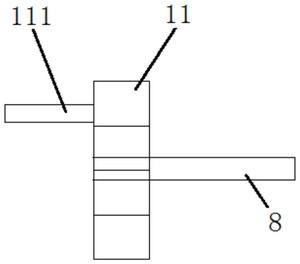
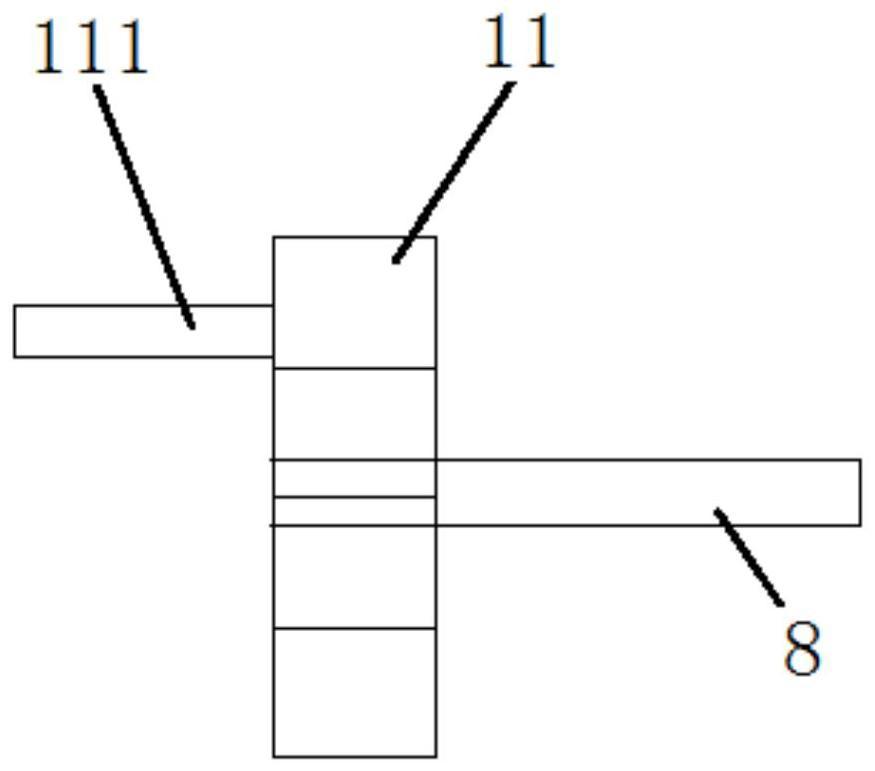
4.根据权利要求2所述的一种千足虫式爬楼机,其特征在于:所述轮组还设有另一种方式,包括沿倾斜板(13)以及固定平台(1)底部依次分布的多个外边轮(10)以及内边轮(11),外边轮(10)和内边轮(11)不处于同一条轴线,内边轮(11)和固定平台(1)外侧之间的距离大于外边轮(10)和固定平台(1)外侧之间的距离,所述内边轮(11)的外侧面设有第二连接杆(111),且第二连接杆(111)不处于内边轮(11)圆心位置处,外边轮(10)通过自身设置的第一连接杆(101)以及内边轮(11)通过自身设置的第二连接杆(111)和第一传动杆(71)以及第二传动杆(72)上的限位孔(73)相连。
9.根据权利要求4所述的一种千足虫式爬楼机,其特征在于:所述第一连接杆(101)的长度小于第二连接杆(111)的长度。
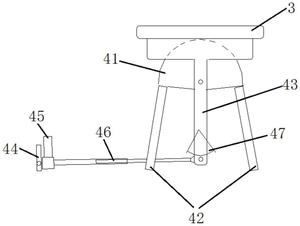
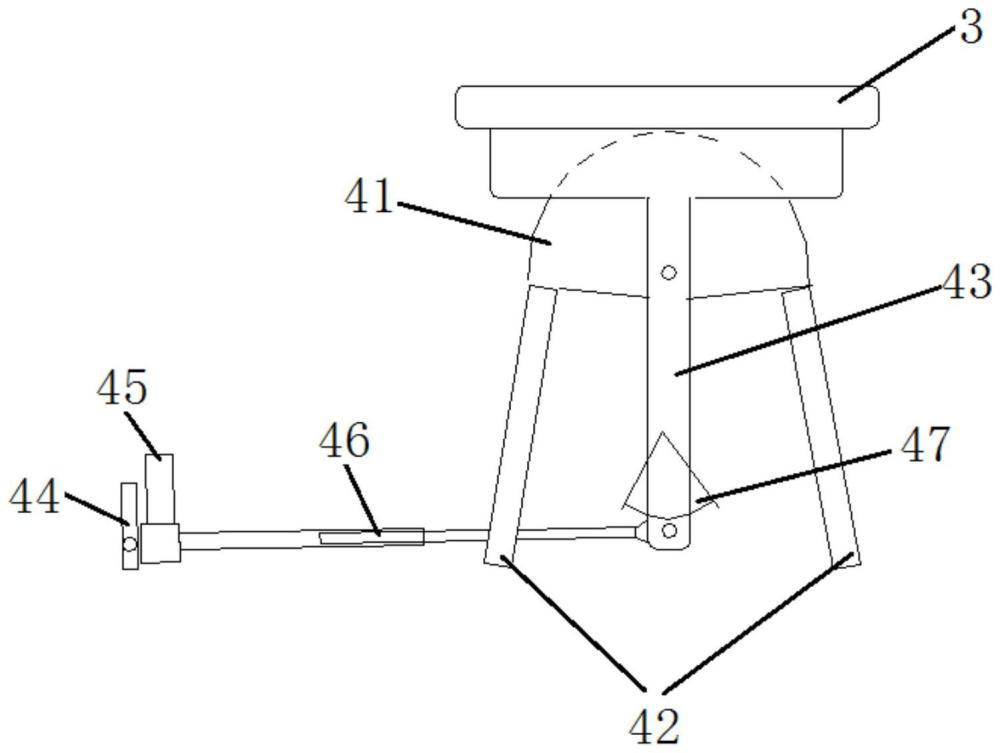
7.根据权利要求1所述的一种千足虫式爬楼机,其特征在于:还包括有自动平衡机构(4),所述自动平衡机构(4)包括通过四根支杆(42)连接于固定平台(1)顶部的半圆固定钢板(41),半圆固定钢板(41)上可旋转连接有摆动杆(43),摆动杆(43)的顶部连接有承载座椅(3),固定平台(1)顶部后端连接有固定板(44),固定板(44)靠近固定平台(1)前端的一面上设有蜗杆电机(45),蜗杆电机(45)的传动端头上连接有伸缩螺杆(46),伸缩螺杆(46)的外侧端头和摆动杆(43)的底端相连,所述摆动杆(43)上设有垂直传感器(47),垂直传感器(47)和蜗杆电机(45)电连接。
10.根据权利要求7所述的一种千足虫式爬楼机,其特征在于:处于固定平台(1)前端一侧面的支杆(42)上设有把手,所述把手上设有控制爬楼机的操控按钮。
1.一种千足虫式爬楼机,包括固定平台(1),其特征在于:所述固定平台(1)的前端设有倾斜板(13),固定平台(1)和倾斜板(13)排布多组轮组,轮组由动力机构驱动。
2.根据权利要求1所述的一种千足虫式爬楼机,其特征在于:所述轮组之间由传动连杆(7)连接,传动连杆(7)包括一根第一传动杆(71)以及一根第二传动杆(72),第二传动杆(72)的端头活动连接于第一传动杆(71)的端头上,所述第一传动杆(71)和第二传动杆(72)上设有多个依次等距排列的限位孔(73),轮组连接于第一传动杆(71)和第二传动杆(72)上的限位孔(73)上。
3.根据权利要求2所述的一种千足虫式爬楼机,其特征在于:所述轮组包括沿倾斜板(13)以及固定平台(1)底部设置的多个外边轮(10),所述外边轮(10)的外侧面设有第一连接杆(101),且第一连接杆(101)不处于外边轮(10)圆心位置处,处于同一轴线上的外边轮(10)均通过自身设置的第一连接杆(101)连接于第一传动杆(71)和第二传动杆(72)上的限位孔(73)内。
4.根据权利要求2所述的一种千足虫式爬楼机,其特征在于:所述轮组还设有另一种方式,包括沿倾斜板(13)以及固定平台(1)底部依次分布的多个外边轮(10)以及内边轮(11),外边轮(10)和内边轮(11)不处于同一条轴线,内边轮(11)和固定平台(1)外侧之间的距离大于外边轮(10)和固定平台(1)外侧之间的距离,所述内边轮(11)的外侧面设有第二连接杆(111),且第二连接杆(111)不处于内边轮(11)圆心位置处,外边轮(10)通过自身设置的第一连接杆(101)以及内边轮(11)通过自身设置的第二连接杆(111)和第一传动杆(71)以及第二传动杆(72)上的限位孔(73)相连。
5.根据权利要求3或4所述的一种千足虫式爬楼机,其特征在于:所述外边轮(10)以及内边轮(11)和倾斜板(13)以及固定平台(1)底部连接处均设有轴承(9)以及配套的转轴(8)。
6.根据权利要求3或4所述的一种千足虫式爬楼机,其特征在于:所述动力机构包括设于倾斜板(13)以及固定平台(1)底部的多个蜗杆减速电机(5),处于倾斜板(13)以及固定平台(1)的外侧端头处的外边轮(10)上均通过转轴(8)连接有一个蜗杆减速电机(5)。
7.根据权利要求1所述的一种千足虫式爬楼机,其特征在于:还包括有自动平衡机构(4),所述自动平衡机构(4)包括通过四根支杆(42)连接于固定平台(1)顶部的半圆固定钢板(41),半圆固定钢板(41)上可旋转连接有摆动杆(43),摆动杆(43)的顶部连接有承载座椅(3),固定平台(1)顶部后端连接有固定板(44),固定板(44)靠近固定平台(1)前端的一面上设有蜗杆电机(45),蜗杆电机(45)的传动端头上连接有伸缩螺杆(46),伸缩螺杆(46)的外侧端头和摆动杆(43)的底端相连,所述摆动杆(43)上设有垂直传感器(47),垂直传感器(47)和蜗杆电机(45)电连接。
8.根据权利要求3或4所述的一种千足虫式爬楼机,其特征在于:所述外边轮(10)以及内边轮(11)的表面均设有环绕式等距分布的轮足(12)。
9.根据权利要求4所述的一种千足虫式爬楼机,其特征在于:所述第一连接杆(101)的长度小于第二连接杆(111)的长度。
10.根据权利要求7所述的一种千足虫式爬楼机,其特征在于:处于固定平台(1)前端一侧面的支杆(42)上设有把手,所述把手上设有控制爬楼机的操控按钮。
说明书
技术领域
本实用新型涉及爬楼机技术领域,具体为一种千足虫式爬楼机。
背景技术
十亿农民进城,农村城市化,平房楼层化,高楼化,一般的楼层是不配备电梯的,要装电梯也是头起脚不起,要加装更是千艰万难。农村的自建楼房大都是三四层五层,老人小孩只有爬楼梯,导致老人小孩子买菜买米十分不便,搬一个重物上下十分不易。目前市场上的爬楼神器,大都爬行不稳定,且必须一人操作、一人坐享,无法实施自驾自享,自上自下,要么就是独家安装滑行轨道型,价钱昂贵、独自享用。
所以,如何设计一种千足虫式爬楼机,成为我们当前需要解决的问题。
发明内容
针对现有技术的不足,本实用新型提供了一种千足虫式爬楼机,解决了老人小孩爬楼困难以及携带物品爬楼困难以及爬楼机爬楼不稳定的问题。
为实现上述目的,本实用新型提供如下技术方案:一种千足虫式爬楼机,包括固定平台,所述固定平台的前端设有倾斜板,固定平台和倾斜板排布多组轮组,轮组由动力机构驱动。
进一步的,所述轮组之间由传动连杆连接,传动连杆包括一根第一传动杆以及一根第二传动杆,第二传动杆的端头活动连接于第一传动杆的端头上,所述第一传动杆和第二传动杆上设有多个依次等距排列的限位孔,轮组连接于第一传动杆和第二传动杆上的限位孔上。
进一步的,所述轮组包括沿倾斜板以及固定平台底部设置的多个外边轮,所述外边轮的外侧面设有第一连接杆,且第一连接杆不处于外边轮圆心位置处,处于同一轴线上的外边轮均通过自身设置的第一连接杆连接于第一传动杆和第二传动杆上的限位孔内。
进一步的,所述轮组还设有另一种方式,包括沿倾斜板以及固定平台底部依次分布的多个外边轮以及内边轮,外边轮和内边轮不处于同一条轴线,内边轮和固定平台外侧之间的距离大于外边轮和固定平台外侧之间的距离,所述内边轮的外侧面设有第二连接杆,且第二连接杆不处于内边轮圆心位置处,外边轮通过自身设置的第一连接杆以及内边轮通过自身设置的第二连接杆和第一传动杆以及第二传动杆上的限位孔相连。
进一步的,所述外边轮以及内边轮和倾斜板以及固定平台底部连接处均设有轴承以及配套的转轴。
进一步的,所述动力机构包括设于倾斜板以及固定平台底部的多个蜗杆减速电机,处于倾斜板以及固定平台的外侧端头处的外边轮上均通过转轴连接有一个蜗杆减速电机。
进一步的,还包括有自动平衡机构,所述自动平衡机构包括通过四根支杆连接于固定平台顶部的半圆固定钢板,半圆固定钢板上可旋转连接有摆动杆,摆动杆的顶部连接有承载座椅,固定平台顶部后端连接有固定板,固定板靠近固定平台前端的一面上设有蜗杆电机,蜗杆电机的传动端头上连接有伸缩螺杆,伸缩螺杆的外侧端头和摆动杆的底端相连,所述摆动杆上设有垂直传感器,垂直传感器和蜗杆电机电连接。
进一步的,所述外边轮以及内边轮的表面均设有环绕式等距分布的轮足。
进一步的,所述第一连接杆的长度小于第二连接杆的长度。
进一步的,处于固定平台前端一侧面的支杆上设有把手,所述把手上设有控制爬楼机的操控按钮。
与现有的技术相比,本实用新型具备以下有益效果:
(1)、本实用新型通过采用动力机构驱动轮组,轮组之间通过传动连杆相互带动,使得各个轮组旋转速度一致,保证了爬楼机爬楼时的稳定性,同时倾斜板因倾斜设置,保证爬楼机在从平面进入斜面时更加快速。
(2)、本实用新型因倾斜板以及固定平台的外侧端头处的外边轮上均通过转轴连接有一个蜗杆减速电机,所以每两个蜗杆减速电机分别通过传动连杆控制倾斜板以及固定平台一侧所有的外边轮和内边轮,这样只要有一个外边轮或内边轮触地,就有两个蜗杆减速电机同时用力,大大提升了爬楼机的爬升能力,这种结构布置增加了爬楼机的稳定性,提升了爬楼机的拐弯能力,使得爬楼机可以实现原地掉头,进退自由。
(3)、本实用新型通过外边轮以及内边轮表面设置的轮足,可以保证外边轮以及内边轮和地面接触点众多,接触面由点到面,爬楼机的通过性大大提高,且不会打滑,同时整体不易老化,不会拉伸,磨损少、更换容易、价格低廉。
(4)、本实用新型通过设置两种不同排列方式的轮组,使得爬楼机可根据不同使用环境进行更换轮组,提高了爬楼机的适用性。
附图说明
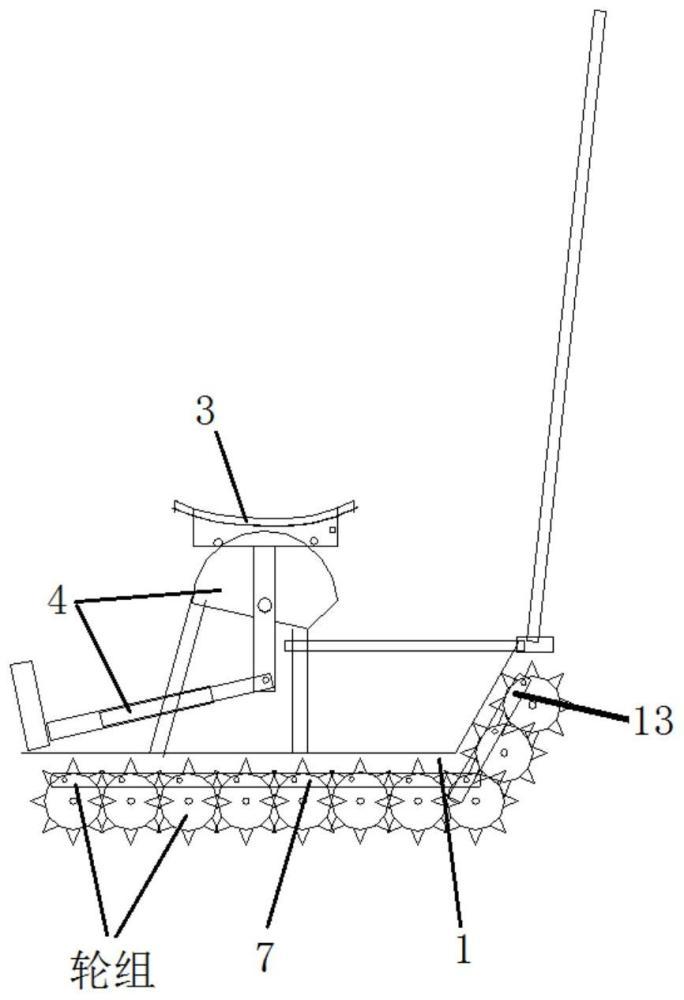
图1为本实用新型的整体结构示意图。
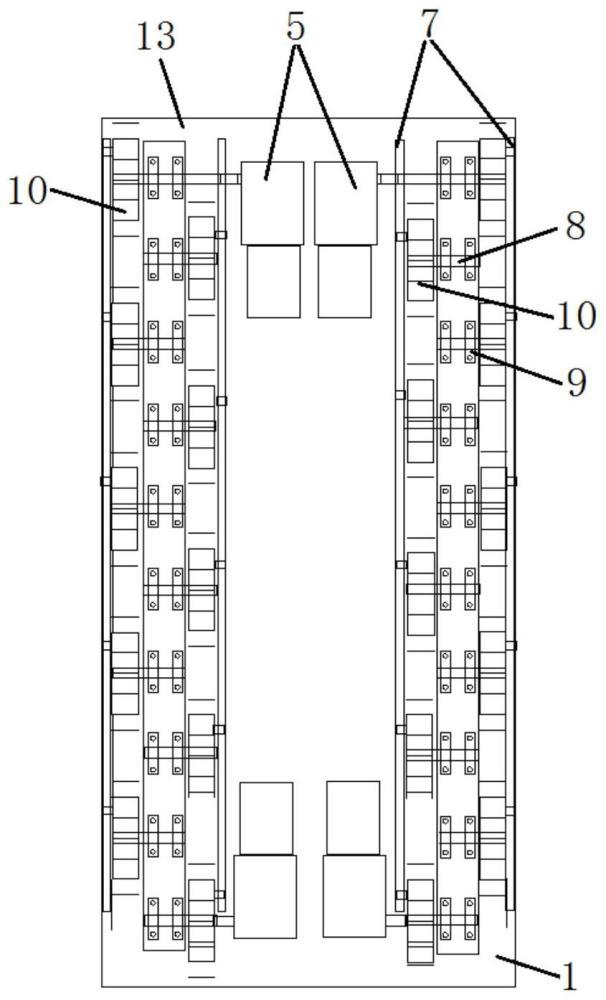
图2为本实用新型的四连高足式结构示意图。
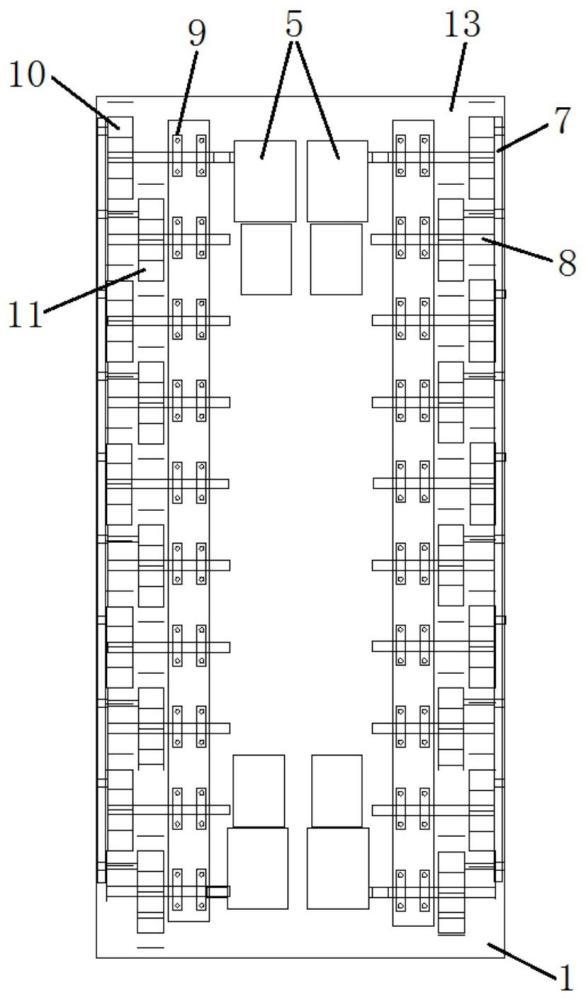
图3为本实用新型的双连底足式结构示意图。
图4为本实用新型的外边轮结构示意图图。
图5为本实用新型的内边轮结构示意图。
图6为本实用新型的自动平衡机构结构示意。
图7为本实用新型的传动连杆结构示意图。
图8为本实用新型的轮足结构示意图。
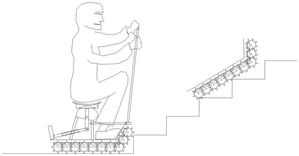
图9为本实用新型的工作示意图。
图10为本实用新型的改进结构示意图。
图中:1、固定平台;3、承载座椅;4、自动平衡机构;41、半圆固定钢板;42、支杆;43、摆动杆;44、固定板;45、蜗杆电机;46、伸缩螺杆;47、垂直传感器;5、蜗杆减速电机;7、传动连杆;71、第一传动杆;72、第二传动杆;73、限位孔;8、转轴;9、轴承;10、外边轮;101、第一连接杆;11、内边轮;111、第二连接杆;12、轮足;13、倾斜板。
具体实施方式
实施例一
如图1所示,本实用新型提供技术方案:一种千足虫式爬楼机,包括固定平台1,所述固定平台1的前端设有倾斜板13(便于爬楼机从平面接触斜面时的爬行),固定平台1和倾斜板13排布多组轮组,轮组由动力机构驱动,轮组之间由传动连杆7连接;如图7所示,传动连杆7包括一根第一传动杆71以及一根第二传动杆72(所述传动连杆7为多段可约束连动杆,因不能弯曲过大所以采用该种独特设计,可根据实际轮组布局情况进行多段设计),第二传动杆72的端头活动连接于第一传动杆71的端头上,所述第一传动杆71和第二传动杆72上设有多个依次等距排列的限位孔73,轮组连接于第一传动杆71和第二传动杆72上的限位孔73上;本实用新型通过采用动力机构驱动轮组,轮组之间通过传动连杆7相互带动,使得各个轮组旋转速度一致,保证了爬楼机爬楼时的稳定性,同时倾斜板13因倾斜设置,保证爬楼机在从平面进入斜面时更加快速;
如图2所示,所述轮组包括沿倾斜板13以及固定平台1底部设置的多个外边轮10,所述外边轮10的外侧面设有第一连接杆101,且第一连接杆101不处于外边轮10圆心位置处,处于同一轴线上的外边轮10均通过自身设置的第一连接杆101连接于第一传动杆71和第二传动杆72上的限位孔73内;通过在倾斜板13以及固定平台1底部设置多个等距交错分布的外边轮10,提高了爬楼机的触地面,增强了爬楼机移动时的稳定性;
轮组的工作流程:使用时,坐于承载座椅3上,启动固定平台1和倾斜板13底部的蜗杆减速电机5,(因处于倾斜板13以及固定平台1的外侧端头处的外边轮10上均通过转轴8连接有一个蜗杆减速电机5,所以每两个蜗杆减速电机5分别控制倾斜板13以及固定平台1一侧的外边轮10),蜗杆减速电机5带动处于倾斜板13以及固定平台1的外侧端头处的转轴8通过轴承9进行转动,转轴8带动其表面相对应的外边轮10进行旋转,外边轮10旋转时带动自身外侧面的第一连接杆101进行环形运行,第一连接杆101带动第一传动杆71以及第二传动杆72进行运动,第一传动杆71和第二传动杆72带动同一侧其他的外边轮10一起旋转,从而使得外边轮10带动固定平台1顶部承载座椅3上的人进行移动。
如图3所示,所述轮组还设有另一种方式,包括沿倾斜板13以及固定平台1底部依次分布的多个外边轮10以及内边轮11,外边轮10和内边轮11不处于同一条轴线,内边轮11和固定平台1外侧之间的距离大于外边轮10和固定平台1外侧之间的距离,所述内边轮11的外侧面设有第二连接杆111,且第二连接杆111不处于内边轮11圆心位置处,外边轮10通过自身设置的第一连接杆101以及内边轮11通过自身设置的第二连接杆111和第一传动杆71以及第二传动杆72上的限位孔73相连;本轮组将外边轮10以及内边轮11均设置在倾斜板13以及固定平台1底部外侧,相对于上述轮组减少了传动连杆7数量,减少了外边轮10以及内边轮11的触地面积,增强了爬楼机的攀爬能力,适用于日常爬楼使用。
轮组另一种方式工作流程:本轮组和上述轮组工作流程同理,均采用蜗杆减速电机5带动外边轮10或内边轮11,再由外边轮10或内边轮11通过第一传动杆71和第二传动杆72带动其他的外边轮10和内边轮11进行旋转,从而实现外边轮10以及内边轮11的同时行走,相对于上述轮组,本轮组增加了内边轮11,且改变了外边轮10的布局方式,减少了两根传动连杆7,但基本原理相同,故不多赘述。
本实用新型通过设置两种不同排列方式的轮组,使得爬楼机可根据不同使用环境进行更换轮组,提高了爬楼机的适用性。
所述外边轮10以及内边轮11和倾斜板13以及固定平台1底部连接处均设有轴承9以及配套的转轴8。
所述动力机构包括设于倾斜板13以及固定平台1底部的多个蜗杆减速电机5,处于倾斜板13以及固定平台1的外侧端头处的外边轮10上均通过转轴8连接有一个蜗杆减速电机5,因倾斜板13以及固定平台1的外侧端头处的外边轮10上均通过转轴8连接有一个蜗杆减速电机5,所以每两个蜗杆减速电机5分别通过传动连杆7控制倾斜板13以及固定平台1一侧所有的外边轮10和内边轮11,这样只要有一个外边轮10或内边轮11触地,就有两个蜗杆减速电机5同时用力,大大提升了爬楼机的爬升能力,这种结构布置增加了爬楼机的稳定性,提升了爬楼机的拐弯能力,使得爬楼机可以实现原地掉头,进退自由。
本实用新型集履带式、轮式结构于一身、结构简单,同时因比履带式的接触面多,接触面大的特点,移动时比履带式结构更稳。
本实用新型相对于传统爬楼机,采用连杆传动,造价更加低廉,实用性大大提高。
如图6所示,还包括有自动平衡机构4,自动平衡机构4包括通过四根支杆42连接于固定平台1顶部的半圆固定钢板41,半圆固定钢板41上可旋转连接有摆动杆43,固定平台1顶部后端连接有固定板44,固定板44靠近固定平台1前端的一面上设有蜗杆电机45,蜗杆电机45的传动端头上连接有伸缩螺杆46,伸缩螺杆46的外侧端头和摆动杆43的底端相连,摆动杆43上设有垂直传感器47,垂直传感器47和蜗杆电机45电连接,自动平衡机构4和承载座椅3的具体连接关系为:摆动杆43的顶部连接有承载座椅3,通过承载座椅3底部设置的自动平衡机构4可以保证人坐在承载座椅3上进行上楼时不会倾倒。
自动平衡机构4的工作流程为:在乘坐爬楼机上楼时,因楼梯面的倾斜设置,爬楼机也会缓慢整体倾斜,这时处于摆动杆43上的垂直传感器47感应到装置不处于水平位置,启动固定板44上的蜗杆电机45,蜗杆电机45带动伸缩螺杆46向自身方向收缩,拉动摆动杆43在半圆固定钢板41的限位下带动顶部的承载座椅3向蜗杆电机45的反方向移动,使得承载座椅3顶部的乘坐者靠近楼梯的倾斜面,降低了自身的中心,平稳上楼。
其中,第一连接杆101的长度小于第二连接杆111的长度。
其中,处于固定平台1前端一侧面的支杆42上设有把手,所述把手上设有控制爬楼机的操控按钮,本实用新型还可以配设遥控器,以及手机远程操控,通过该种操作方式可以进行远程对爬楼机的可视操控,使得整体操作使用更加简单。
如图8所示,外边轮10以及内边轮11的表面均设有环绕式等距分布的轮足12,通过外边轮10以及内边轮11表面设置的轮足12,可以保证外边轮10以及内边轮11和地面接触点众多,接触面由点到面,爬楼机的通过性大大提高,且不会打滑,同时整体不易老化,不会拉伸,磨损少、更换容易、价格低廉。
如图9所示,本实用新型用途广泛,可以民用上下楼梯,也可消防救援,人员疏徽,救资传送,无人救火,水枪喷水,军事巷战;同时因本实用新型具有良好通过能力,可以根据不同的需求进行外边轮10以及内边轮11的任意组合,结构组装,本实用新型的底盘低,可以提高自身隐蔽性,同时无人操控可以有效减少人员损伤,且可以根推不同的须求小轮任意组合,结构改装。
实施例二
如图10所示,本实施例在实施例一上进行改进,将固定平台1从中间断开,将断开的两端可旋转连接(断开的两段只可向顶部弯折),同时对传动连杆7进行多段式设计,及将第一传动杆71分为两段,且分开的两段端头也可旋转连接,将多段的传动连杆7安装于固定平台1以及倾斜板13底部的轮组上使其相连,这时相对于实施例一来说,固定平台1底部的轮组更加贴合弧形地面,即楼梯的斜面和平面相交处,而采用了该种设计方式后,固定平台1顶部的自动平衡机构4也需进行相应改进,即将靠近倾斜板13一侧的两个支杆42底部和固定平台1顶部之间进行滑动设计,将靠近倾斜板13一侧的两个支杆42顶部和半圆固定钢板41进行活动连接,将另外两个支杆42底部和固定平台1顶部之间进行活动连接,这样在固定平台1的两段弯曲时,自动平衡机构4上的支杆42也可进行相应的弯曲以及滑动来保证承载座椅3的平衡。
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
价值度评估
技术价值
经济价值
法律价值
0 0 046.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:46.0分
该专利价值较低 (仅供参考)
本专利文献中包含 【2 个实施例】、 【1 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间3 年】专利权的维持时间越长,其价值对于权利人而言越高。
技术价值 30.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
6 个月独立权利要求数量
1 个从属权利要求数量
9 个说明书页数
5 页实施例个数
2 个发明人数量
1 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
1 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 6.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
个人许可备案
0 次权利质押
0 次权利转移
0 个海关备案
否法律价值 10.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
3法律状态
有权-审定授权






 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...