【中国发明,中国发明授权】一种适用于爬墙机器人的履带吸盘组件
无权-未缴年费 中国
- 申请号:
- CN201210299724.1
- 专利权人:
- 常州工学院
- 授权公告日/公开日:
- 2014.10.22
- 专利有效期:
- 2012.08.21-2032.08.21
- 技术分类:
- B62:无轨陆用车辆
- 转化方式:
- 转让
- 价值度指数:
-
- 52.0分
- 价格:
- 面议
发布人
常州工学院
联系人何老师
-

- 0519-88238869

-

- 302910554
-

- 13151263266

- 专利信息&法律状态
- 专利自评
- 专利技术文档
- 价值度指数
- 发明人阵容
 著录项
著录项
- 申请号
- CN201210299724.1
- 申请日
- 20120821
- 公开/公告号
- CN102774440A
- 公开/公告日
- 20121114
- 申请/专利权人
- [常州工学院]
- 发明/设计人
- [唐建敏]
- 主分类号
- B62D55/265
- IPC分类号
- C12N 9/0008(2013.01) C12N 9/16
- CPC分类号
- C12N 9/0008(2013.01) C12N 9/16(2013.01)
- 分案申请地址
- 国省代码
- 江苏(32)
- 颁证日
- G06T1/00
- 代理人
- [汤志和]
摘要
本发明涉及一种适用于爬墙机器人的履带吸盘组件,由若干个结构相同的吸附关节构成的履带,所述每一个吸附关节包括至少一个常闭型的电磁真空吸盘,所述电磁真空吸盘由吸盘控制电路控制;所述电磁真空吸盘适于在得电时处于待吸附状态,失电时处于吸附状态;所述吸盘控制电路适于在所述履带滚动时,控制处于悬空状态和与幕墙接触的各电磁真空吸盘失电,同时控制即将接触或即将离开所述幕墙的电磁真空吸盘得电;本发明采用独立的所述常闭型的电磁真空吸盘,每个吸盘都为独立真空源,当机器人爬墙时,不会因为遇到瓷砖缝隙而造成整个真空源削弱,同时更不会影响其他吸盘正常工作。
法律状态
| 法律状态公告日 | 20181214 |
| 法律状态 | 专利权的终止 |
| 法律状态信息 | 未缴年费专利权终止 IPC(主分类):B62D 55/265 申请日:20120821 授权公告日:20141022 终止日期:20170821 |
| 法律状态公告日 | 20181214 |
| 法律状态 | 专利权的终止 |
| 法律状态信息 | 未缴年费专利权终止 IPC(主分类):B62D 55/265 申请日:20120821 授权公告日:20141022 终止日期:20170821 |
| 法律状态公告日 | 20141022 |
| 法律状态 | 授权 |
| 法律状态信息 | 授权 |
| 法律状态公告日 | 20130109 |
| 法律状态 | 实质审查的生效 |
| 法律状态信息 | 实质审查的生效 IPC(主分类):B62D 55/265 申请日:20120821 |
| 法律状态公告日 | 20121114 |
| 法律状态 | 公开 |
| 法律状态信息 | 公开 |
权利要求
权利要求数量(6)
独立权利要求数量(2)
1.一种适用于爬墙机器人的履带吸盘组件,其特征在于:由若干个结构相同的吸附关节构成的履带,所述每一个吸附关节包括至少一个常闭型的电磁真空吸盘,所述电磁真空吸盘由吸盘控制电路控制;
所述电磁真空吸盘适于在得电时处于待吸附状态,失电时处于吸附状态;
所述吸盘控制电路适于在所述履带滚动时,控制处于悬空状态和与幕墙接触的各电磁真空吸盘失电,同时控制即将接触或即将离开所述幕墙的电磁真空吸盘得电。
2.根据权利要求1所述的履带吸盘组件,其特征在于,所述电磁真空吸盘包括:柱形壳体、设于所述柱形壳体内的活塞、设于所述柱形壳体内的适于使所述活塞作伸动作的电磁线圈、设于所述柱形壳体底部且与所述活塞的底部相连橡胶吸盘、设于所述柱形壳体内的适于使所述活塞作缩动作的弹性机构。
3.根据权利要求2所述的履带吸盘组件,其特征在于,所述电磁线圈设于所述柱形壳体内,且该电磁线圈的上下方分别设有第一、第二腔体;
所述活塞的中上部穿过所述电磁线圈的中央通孔,活塞顶部固定有处于所述第一腔体中的第一限位板,活塞中央部固定有处于所述第二腔体中的第二限位板;
该第二限位板的下方与所述橡胶吸盘之间构成第三腔体,该第三腔体的内壁上设有环形台面,在所述第二限位板与环形台面之间设有构成所述弹性机构的弹簧,所述活塞的中下部穿过所述弹簧的中央通孔。
4.根据权利要求2所述的履带吸盘组件,其特征在于,所述电磁线圈设于所述柱形壳体内,且该电磁线圈的上下方分别设有第一、第二腔体;
所述弹性机构为处于所述第一腔体中的弹簧,且所述活塞的中上部穿过所述弹簧的中央通孔,活塞顶部固定有处于所述第一腔体中的第一限位板,活塞中央部固定有处于所述第一腔体中且处于所述弹簧底部的第二限位板;
该第一腔体的内壁上设有环形台面,所述弹簧设于所述第一限位板与环形台面之间;
所述活塞的中下部穿过所述电磁线圈的中央通孔。
5.根据权利要求1所述的履带吸盘组件,其特征在于,所述吸盘控制电路包括:设于所述爬壁机器人的前端底部以检测所述电磁真空吸盘即将接触所述幕墙的第一传感器、设于所述爬壁机器人的后端底部以检测所述电磁真空吸盘即将离开所述幕墙的第二传感器,以及与所述第一、第二传感器相连的控制模块。
6.一种应用权利要求1所述履带吸盘组件的爬壁机器人的爬行方法,包括:
①初始时,所述爬壁机器人的吸盘控制电路控制电磁真空吸盘的电磁线圈处于失电状态;
②当设于所述爬壁机器人的前端底部的第一传感器检测到所述履带上的一电磁真空吸盘接近幕墙面时,则所述吸盘控制电路控制该电磁真空吸盘的电磁线圈得电,即所述电磁线圈吸引所述活塞并带动橡胶吸盘处于待吸附状态,即所述电磁真空吸盘处于待吸附状态;当所述第一传感器检测到该电磁真空吸盘完全贴于幕墙上后,所述吸盘控制电路控制该电磁真空吸盘的电磁线圈失电,即该电磁真空吸盘中的弹性机构使活塞带动橡胶吸盘吸附于幕墙上,即所述电磁真空吸盘处于吸附状态;
③重复步骤②,使所述履带的工作面整体吸附在幕墙上;
④当履带滚动时,所述吸盘控制电路控制即将接触所述幕墙的电磁真空吸盘得电,使相应的电磁真空吸盘分别接触幕墙,然后再控制所述相应的电磁真空吸盘失电;并当设于所述爬壁机器人的后端底部的第二传感器检测到所述履带上的一电磁真空吸盘即将离开幕墙面时,则所述吸盘控制电路控制该电磁真空吸盘的电磁线圈得电,使相应的电磁真空吸盘离开幕墙,然后再由所述吸盘控制电路控制所述相应的电磁真空吸盘失电。
1.一种适用于爬墙机器人的履带吸盘组件,其特征在于:由若干个结构相同的吸附关节构成的履带,所述每一个吸附关节包括至少一个常闭型的电磁真空吸盘,所述电磁真空吸盘由吸盘控制电路控制;
所述电磁真空吸盘适于在得电时处于待吸附状态,失电时处于吸附状态;
所述吸盘控制电路适于在所述履带滚动时,控制处于悬空状态和与幕墙接触的各电磁真空吸盘失电,同时控制即将接触或即将离开所述幕墙的电磁真空吸盘得电。
2.根据权利要求1所述的履带吸盘组件,其特征在于,所述电磁真空吸盘包括:柱形壳体、设于所述柱形壳体内的活塞、设于所述柱形壳体内的适于使所述活塞作伸动作的电磁线圈、设于所述柱形壳体底部且与所述活塞的底部相连橡胶吸盘、设于所述柱形壳体内的适于使所述活塞作缩动作的弹性机构。
3.根据权利要求2所述的履带吸盘组件,其特征在于,所述电磁线圈设于所述柱形壳体内,且该电磁线圈的上下方分别设有第一、第二腔体;
所述活塞的中上部穿过所述电磁线圈的中央通孔,活塞顶部固定有处于所述第一腔体中的第一限位板,活塞中央部固定有处于所述第二腔体中的第二限位板;
该第二限位板的下方与所述橡胶吸盘之间构成第三腔体,该第三腔体的内壁上设有环形台面,在所述第二限位板与环形台面之间设有构成所述弹性机构的弹簧,所述活塞的中下部穿过所述弹簧的中央通孔。
4.根据权利要求2所述的履带吸盘组件,其特征在于,所述电磁线圈设于所述柱形壳体内,且该电磁线圈的上下方分别设有第一、第二腔体;
所述弹性机构为处于所述第一腔体中的弹簧,且所述活塞的中上部穿过所述弹簧的中央通孔,活塞顶部固定有处于所述第一腔体中的第一限位板,活塞中央部固定有处于所述第一腔体中且处于所述弹簧底部的第二限位板;
该第一腔体的内壁上设有环形台面,所述弹簧设于所述第一限位板与环形台面之间;
所述活塞的中下部穿过所述电磁线圈的中央通孔。
5.根据权利要求1所述的履带吸盘组件,其特征在于,所述吸盘控制电路包括:设于所述爬壁机器人的前端底部以检测所述电磁真空吸盘即将接触所述幕墙的第一传感器、设于所述爬壁机器人的后端底部以检测所述电磁真空吸盘即将离开所述幕墙的第二传感器,以及与所述第一、第二传感器相连的控制模块。
6.一种应用权利要求1所述履带吸盘组件的爬壁机器人的爬行方法,包括:
①初始时,所述爬壁机器人的吸盘控制电路控制电磁真空吸盘的电磁线圈处于失电状态;
②当设于所述爬壁机器人的前端底部的第一传感器检测到所述履带上的一电磁真空吸盘接近幕墙面时,则所述吸盘控制电路控制该电磁真空吸盘的电磁线圈得电,即所述电磁线圈吸引所述活塞并带动橡胶吸盘处于待吸附状态,即所述电磁真空吸盘处于待吸附状态;当所述第一传感器检测到该电磁真空吸盘完全贴于幕墙上后,所述吸盘控制电路控制该电磁真空吸盘的电磁线圈失电,即该电磁真空吸盘中的弹性机构使活塞带动橡胶吸盘吸附于幕墙上,即所述电磁真空吸盘处于吸附状态;
③重复步骤②,使所述履带的工作面整体吸附在幕墙上;
④当履带滚动时,所述吸盘控制电路控制即将接触所述幕墙的电磁真空吸盘得电,使相应的电磁真空吸盘分别接触幕墙,然后再控制所述相应的电磁真空吸盘失电;并当设于所述爬壁机器人的后端底部的第二传感器检测到所述履带上的一电磁真空吸盘即将离开幕墙面时,则所述吸盘控制电路控制该电磁真空吸盘的电磁线圈得电,使相应的电磁真空吸盘离开幕墙,然后再由所述吸盘控制电路控制所述相应的电磁真空吸盘失电。
说明书
技术领域
本发明涉及一种适用于爬墙机器人的履带吸盘组件。
背景技术
我们在制作玻璃幕墙清洗机器人时,需要一种真空吸盘使清洗机器人附着在玻璃幕墙上自由行动,现有的真空吸盘都需要外接一个真空发生器和多个电磁控制阀,控制真空吸盘与大气或真空源的联通,结构复杂。一般,为了使清洗机器人也能在复杂的外墙行走,大多采用多个真空吸盘形成吸盘阵列,这个时候就暴露出公用真空源的弱点,例如在贴有瓷砖的墙面行走时,由于存在瓷砖大的缝隙,吸盘阵列中就有吸盘密封不严,造成公共真空源真空度下降,影响使用。
申请号CN96205687.1公开了一种“高层建筑墙面自动清洗装置”,该装置采用了多吸盘的吸附装置,各吸盘之间不是独立的,其中一个吸盘泄露时,就会影响整个吸盘的真空度降低而导致清洗装置不能停留在壁面上。
申请号01274743.2公开了一种“单吸盘和履带式多吸盘相结合的爬壁机器人”虽然提到了独立的单吸盘,但是需要利用吸水风机持续工作来维持整体真空度,所以没有真正意义的实现独立吸盘。
为了克服以上缺点,需要为每个吸盘准备独立的真空源或加装压力检测装置进行实时控制,这都带来系统复杂性和成本的上升,并且这种机器人若采用独立电源的话,真空源必须时刻工作,所以依靠大量的电量来维持真空,所以若采用独立电源的话,该机器人无法长时间持续工作,若采用外接电源的话,又给吊装带来不便。
发明内容
本发明首要解决的技术问题是提供一种结构简单,各吸盘的真空源互不影响的履带吸盘组件。
本发明还解决了第二个技术问题是提供一种能降低功耗,并且能延长机器人工作时间的履带吸盘组件。
为解决上述技术问题,本发明提供了一种适用于爬墙机器人的履带吸盘组件,由若干个结构相同的吸附关节构成的履带,所述每一个吸附关节包括至少一个常闭型的电磁真空吸盘,所述电磁真空吸盘由吸盘控制电路控制;所述电磁真空吸盘适于在得电时处于待吸附状态,失电时处于吸附状态;所述吸盘控制电路适于在所述履带滚动时,控制处于悬空状态和与幕墙接触的各电磁真空吸盘失电,同时控制即将接触或即将离开所述幕墙的电磁真空吸盘得电。
其中,所述待吸附状态所述电磁真空吸盘的橡胶吸盘的盘面为平面状态。
进一步,所述电磁真空吸盘包括:柱形壳体、设于所述柱形壳体内的活塞、设于所述柱形壳体内的适于使所述活塞作伸动作的电磁线圈、设于所述柱形壳体底部且与所述活塞的底部相连橡胶吸盘、设于所述柱形壳体内的适于使所述活塞作缩动作的弹性机构。
进一步,所述电磁线圈设于所述柱形壳体内,且该电磁线圈的上下方分别设有第一、第二腔体;所述活塞的中上部穿过所述电磁线圈的中央通孔,活塞顶部固定有处于所述第一腔体中的第一限位板,活塞中央部固定有处于所述第二腔体中的第二限位板;该第二限位板的下方与所述橡胶吸盘之间构成第三腔体,该第三腔体的内壁上设有环形台面,在所述第二限位板与环形台面之间设有构成所述弹性机构的弹簧,所述活塞的中下部穿过所述弹簧的中央通孔。
进一步,所述电磁线圈设于所述柱形壳体内,且该电磁线圈的上下方分别设有第一、第二腔体;所述弹性机构为处于所述第一腔体中的弹簧,且所述活塞的中上部穿过所述弹簧的中央通孔,活塞顶部固定有处于所述第一腔体中的第一限位板,活塞中央部固定有处于所述第一腔体中且处于所述弹簧底部的第二限位板;该第一腔体的内壁上设有环形台面,所述弹簧设于所述第一限位板与环形台面之间;所述活塞的中下部穿过所述电磁线圈的中央通孔。
进一步,为了更好的检测所述电磁真空吸盘吸附状态,所述吸盘控制电路包括:设于所述爬壁机器人的前端底部以检测所述电磁真空吸盘即将接触所述幕墙的第一传感器、设于所述爬壁机器人的后端底部以检测所述电磁真空吸盘即将离开所述幕墙的第二传感器;以及与所述第一、第二传感器相连的控制模块。
本发明还提供了一种应用所述履带吸盘组件的爬壁机器人的爬行方法,包括:
①初始时,所述爬壁机器人的吸盘控制电路控制电磁真空吸盘的电磁线圈处于失电状态;
②当设于所述爬壁机器人的前端底部的第一传感器检测到所述履带上的一电磁真空吸盘接近幕墙面时,则所述吸盘控制电路控制该电磁真空吸盘的电磁线圈得电,即所述电磁线圈吸引所述活塞并带动橡胶吸盘处于待吸附状态,即所述电磁真空吸盘处于待吸附状态;当所述第一传感器检测到该电磁真空吸盘完全贴于幕墙上后,所述吸盘控制电路控制该电磁真空吸盘的电磁线圈失电,即该电磁真空吸盘中的弹性机构使活塞带动橡胶吸盘吸附于幕墙上,即所述电磁真空吸盘处于吸附状态;
③重复步骤②,使所述履带的工作面整体吸附在幕墙上;
④当履带滚动时,所述吸盘控制电路控制即将接触所述幕墙的电磁真空吸盘得电,使相应的电磁真空吸盘分别接触幕墙,然后再控制所述相应的电磁真空吸盘失电;并当设于所述爬壁机器人的后端底部的第二传感器检测到所述履带上的一电磁真空吸盘即将离开幕墙面时,则所述吸盘控制电路控制该电磁真空吸盘的电磁线圈得电,使相应的电磁真空吸盘离开幕墙,然后再由所述吸盘控制电路控制所述相应的电磁真空吸盘失电。
本发明具有以下优点:(1)采用独立的所述常闭型的电磁真空吸盘,每个吸盘都为独立真空源,当机器人爬墙时,不会因为遇到瓷砖缝隙而造成整个真空源削弱,同时更不会影响其他吸盘正常工作;(2)所述电磁真空吸盘为常闭型,即得电时处于待吸附状态,失电时处于吸附状态,这样机器人在爬墙过程中,在履带底部与墙面接触的吸盘无需在提供电源,节省了大量的电量;(3)由于采用常闭性的电磁真空吸盘,所以当机器人若出现故障或者突然失电时,不会掉落造成损坏;(4)在吸盘离开幕墙时,对该吸盘通电,使橡胶吸盘释放负压,提高爬墙速度;(5)通过每个吸附关节的轴连接构成了履带吸盘,便于实现履带的可重构。
附图说明
为了使本发明的内容更容易被清楚的理解,下面根据的具体实施例并结合附图,对本发明作进一步详细的说明,其中
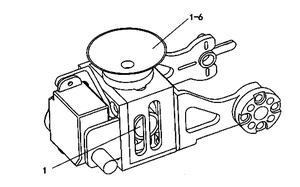
图1 本发明的吸附关节的结构示意图;
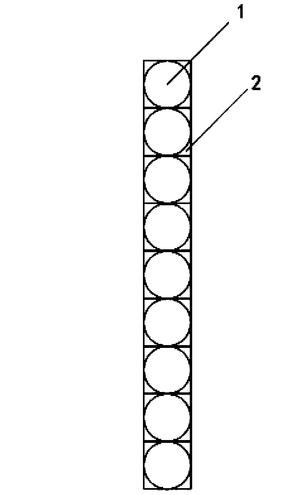
图2本发明的吸附关节的分布结构示意图的一种方式;
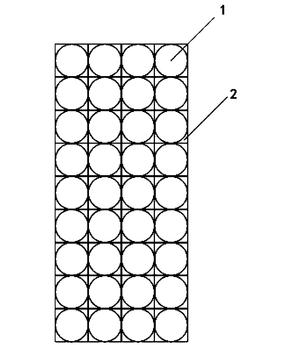
图3本发明的吸附关节的分布结构示意图的第二种方式;
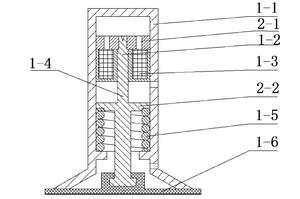
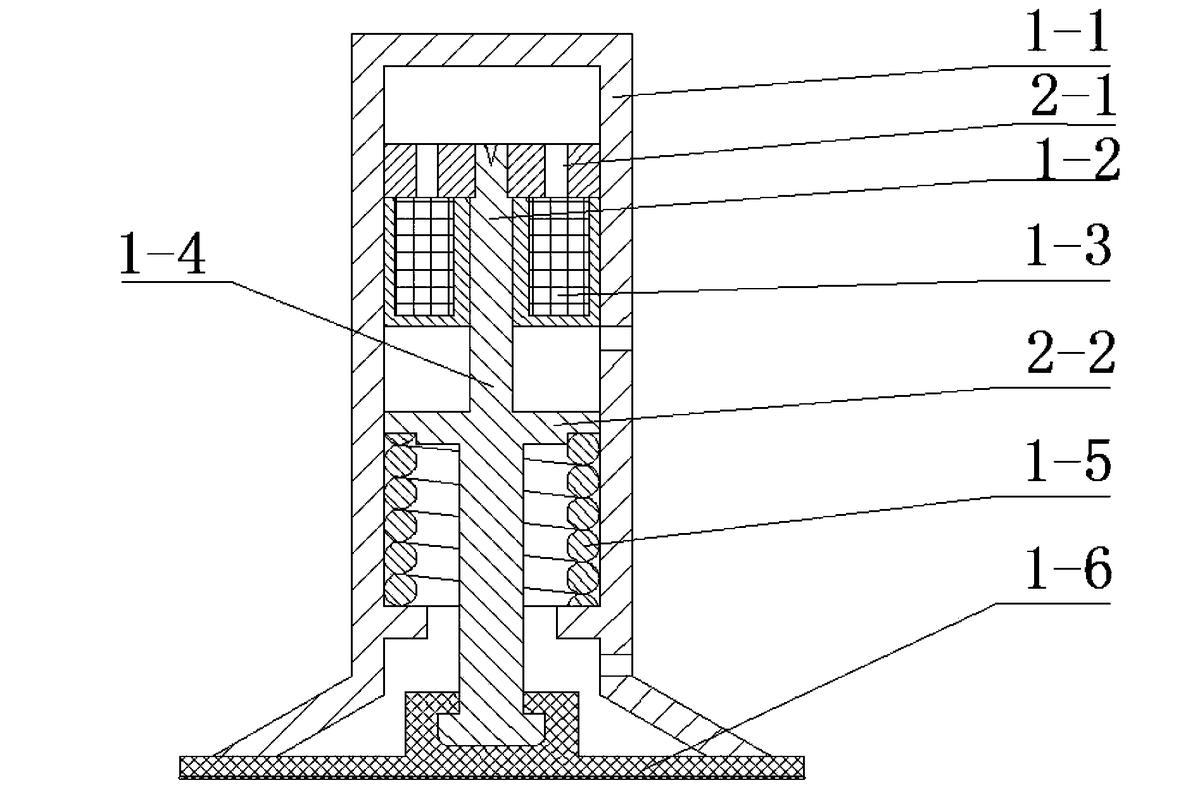
图4为本发明的电磁真空吸盘得电时的一种实施方式的结构示意图;
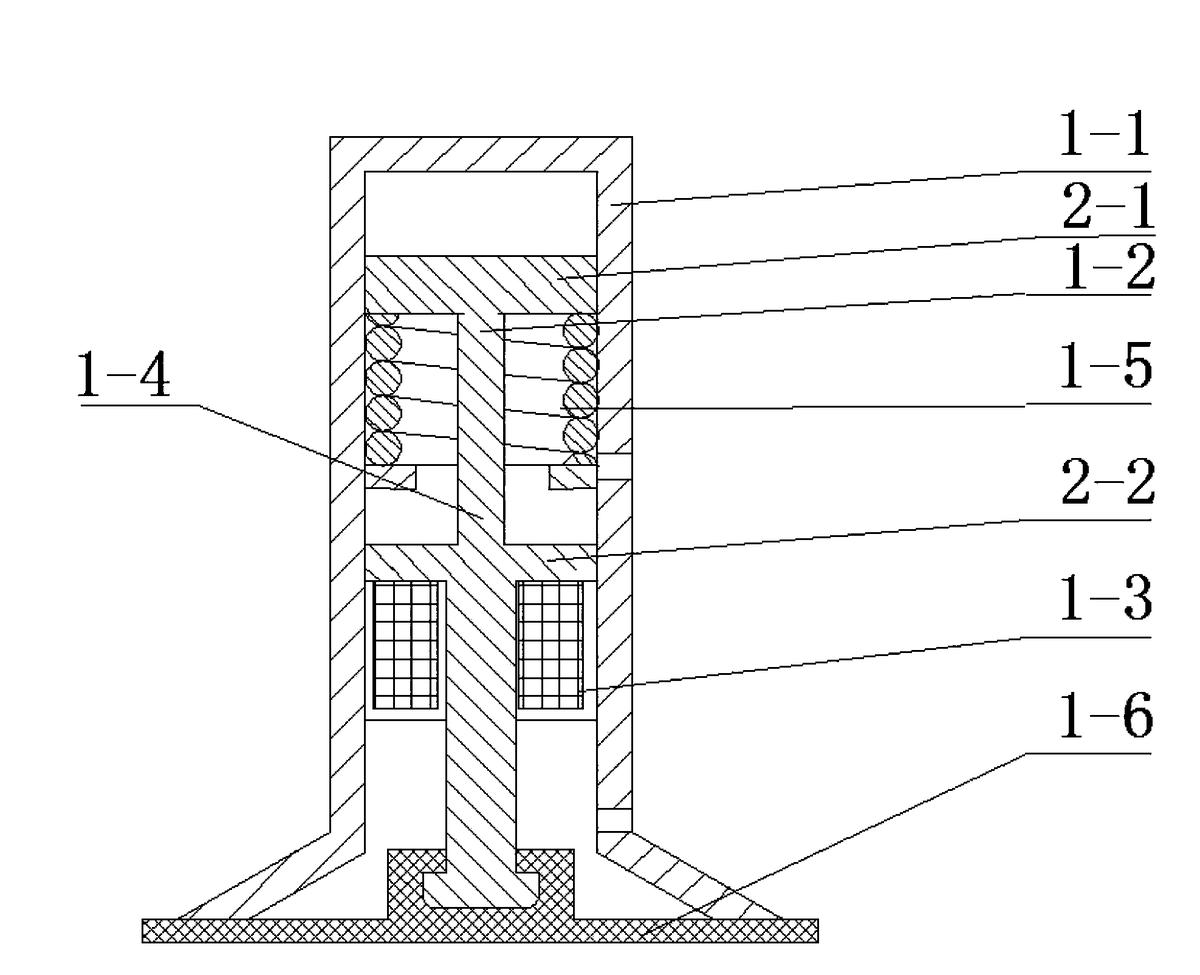
图5为本发明的电磁真空吸盘得电时的另一种实施方式的结构示意图。
具体实施方式
下面结合附图及实施例对本发明进行详细说明:
实施例1
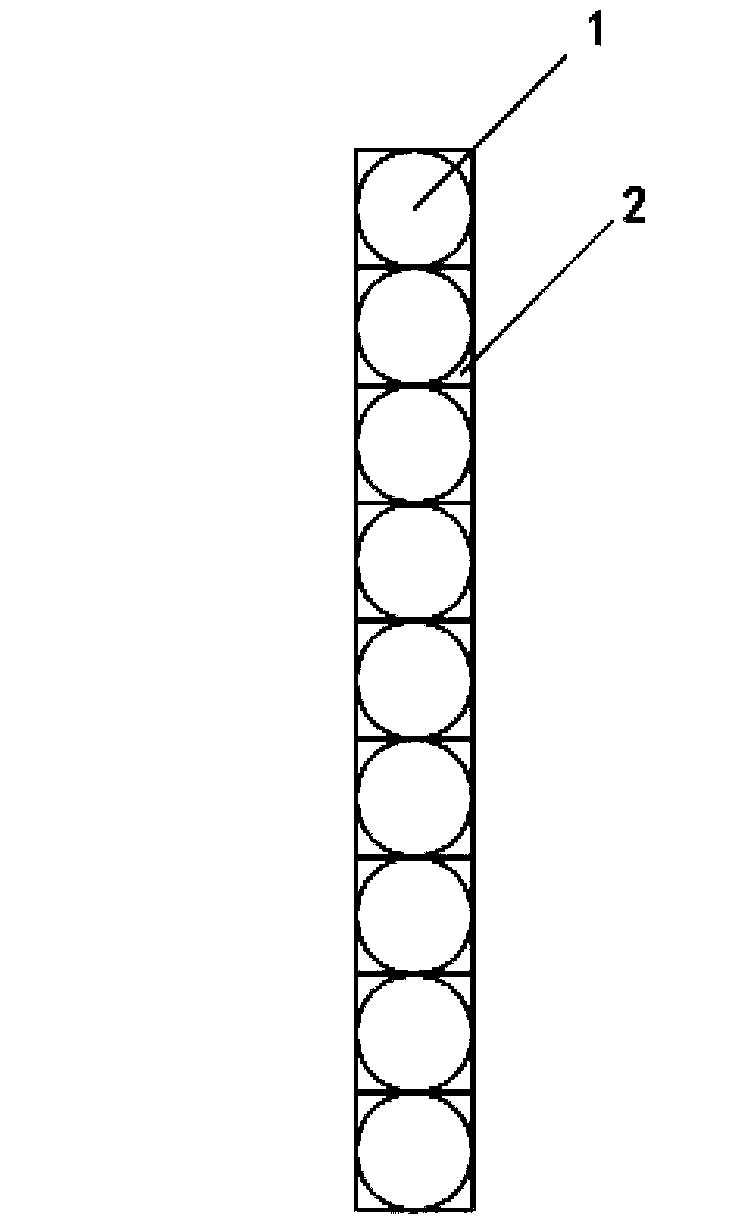
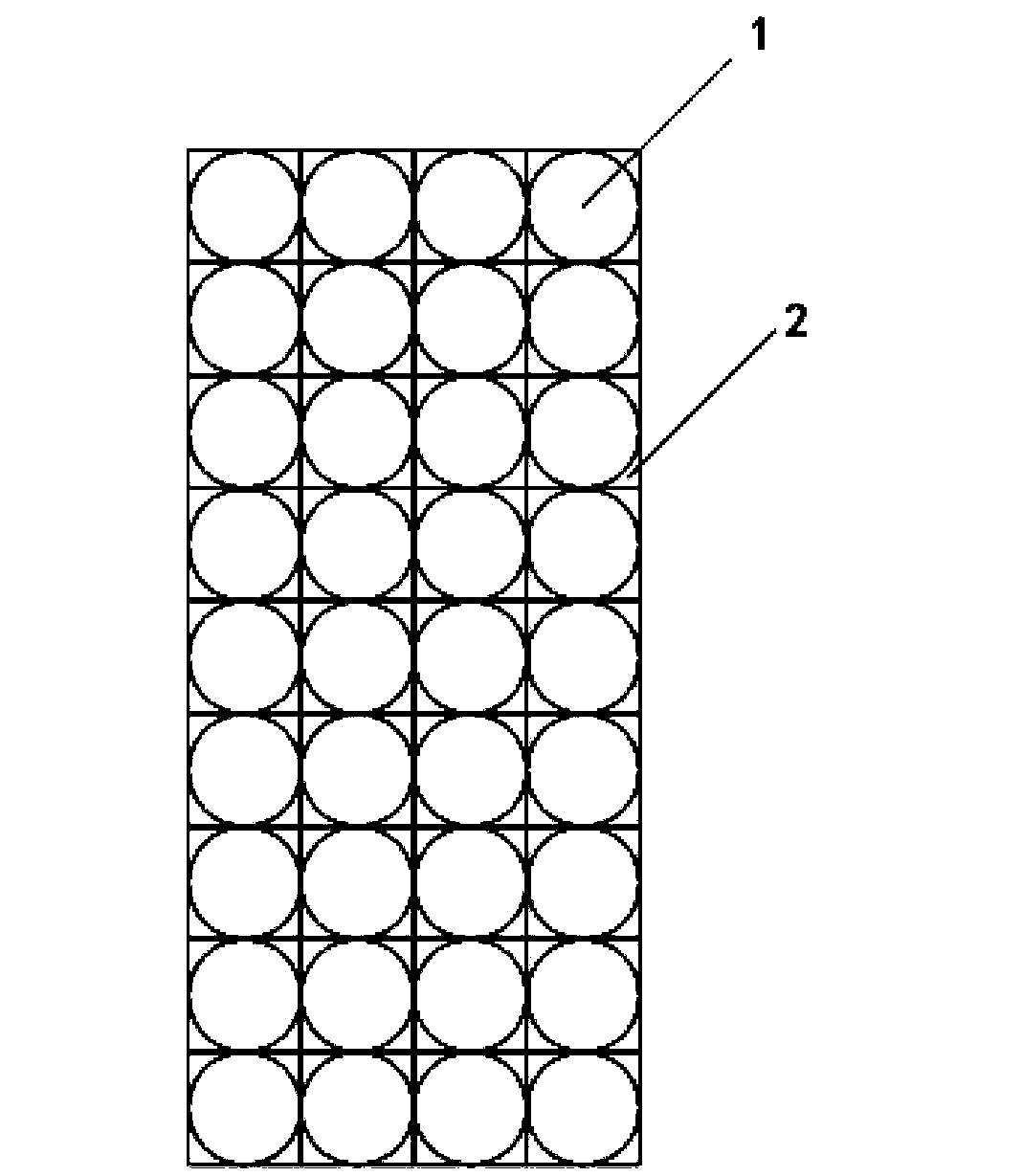
如图1-3,一种适用于爬墙机器人的履带吸盘组件,由若干个结构相同的吸附关节构成的履带2,所述每一个吸附关节包括至少一个常闭型的电磁真空吸盘1,所述电磁真空吸盘1由吸盘控制电路控制;所述电磁真空吸盘1,其适于在得电时处于待吸附状态,失电时处于吸附状态;所述吸盘控制电路,其适于在所述履带2滚动时,控制处于悬空状态和与幕墙接触的各电磁真空吸盘1失电,同时控制即将接触或即将离开所述幕墙的电磁真空吸盘1得电。
安装于所述吸附关节后侧的U型支架连接轴与后一节所述吸附关节的支架安装孔相连,以构成所述爬墙机器人的履带2。
所述吸附关节也可以放入1个以上的所述电磁真空吸盘1。
所述吸附关节可以为横向均匀分布,或者矩阵均匀分布以构成履带。
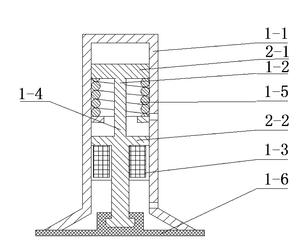
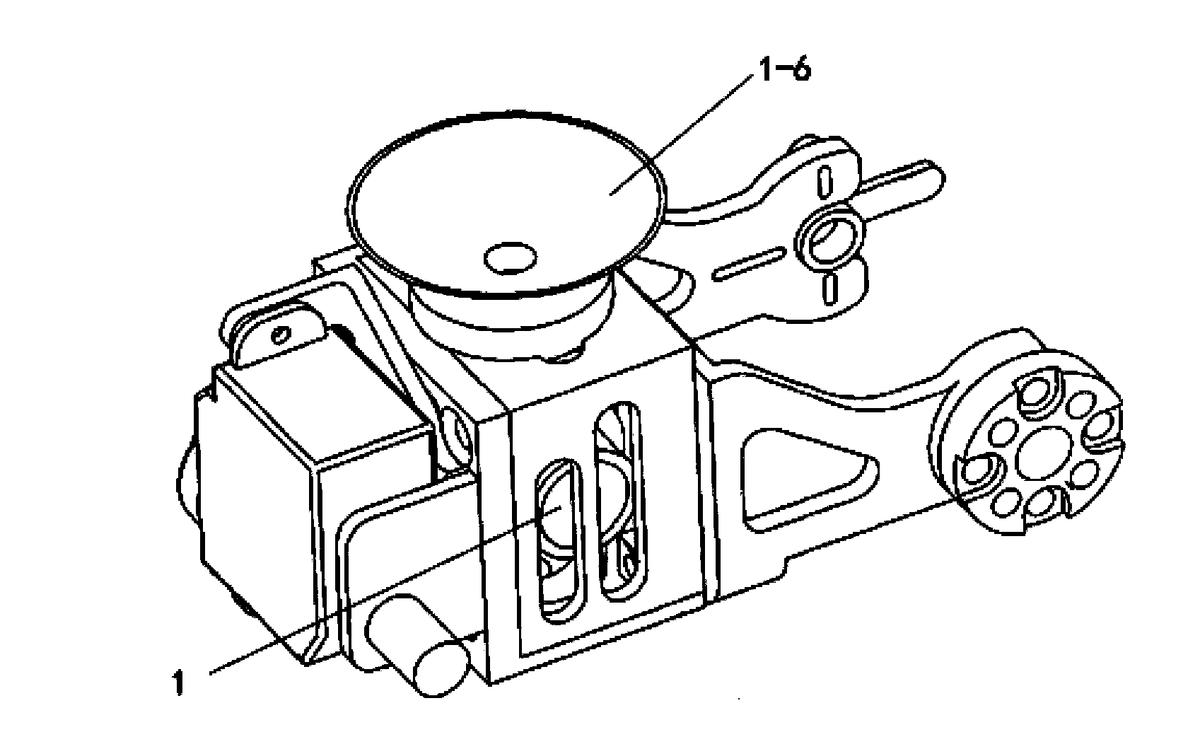
所述电磁真空吸1包括:柱形壳体1-1、设于所述柱形壳体1-1内的活塞1-2、设于所述柱形壳体1-1内的适于使所述活塞1-2作伸动作的电磁线圈1-3、设于所述柱形壳体1-1底部且与所述活塞1-2的底部相连橡胶吸盘1-6、设于所述柱形壳体1-1内的适于使所述活塞1-2作缩动作的弹性机构1-5。
所述常闭型的电磁真空吸盘1的实施方式可以有以下三种:
如图4所示,所述电磁真空吸盘1的第一种实施方式,所述电磁线圈1-3设于所述柱形壳体1-1内,且该电磁线圈1-3的上下方分别设有第一、第二腔体;所述活塞2的中上部穿过所述电磁线圈1-3的中央通孔,活塞1-2顶部固定有处于所述第一腔体中的第一限位板2-1,活塞1-2中央部固定有处于所述第二腔体中的第二限位板2-2;该第二限位板2-2的下方与所述橡胶吸盘1-6之间构成第三腔体,该第三腔体的内壁上设有环形台面1-1,在所述第二限位板2-2与环形台面之间设有构成所述弹性机构1-5的弹簧,所述活塞1-2的中下部穿过所述弹簧的中央通孔。
所述第一种常闭性的电磁真空吸盘1的工作方式:失电时,弹簧1-5迫使所述第二限位板2-2做缩动作,所述第二限位板2-2带动所述橡胶吸盘1-6做缩动作,则所述橡胶吸盘1-6产生负压吸附与幕墙壁上;得电时,所述电磁线圈1-3产生磁场吸引第一限位板2-1做伸动作,所述第一限位板2-1带动所述橡胶吸盘1-6做伸动作,故所述橡胶吸盘1-6释放负压。
如图5所示,所述电磁真空吸盘的第二种实施方法,所述电磁线圈3设于所述柱形壳体1-1内,且该电磁线圈1-3的上下方分别设有第一、第二腔体;所述弹性机构1-5为处于所述第一腔体中的弹簧,且所述活塞1-2的中上部穿过所述弹簧的中央通孔,活塞1-2顶部固定有处于所述第一腔体中的第一限位板2-1,活塞1-2中央部固定有处于所述第一腔体中且处于所述弹簧底部的第二限位板2-2;该第一腔体的内壁上设有环形台面,所述弹簧设于所述第一限位板2-1与环形台面之间;所述活塞1-2的中下部穿过所述电磁线圈1-3的中央通孔。
所述第一限位板2-1、第二限位板2-2也称为活塞1-2的第一头部、第二头部。所述第一限位板2-1为适于磁铁吸引的材质,例如、铁、镍。同时若调整电磁线圈1-3的磁极方向,所述第一限位板2-1也可以为相应磁极的磁性橡胶,弹性材料的弹力大于所述第一限位板2-1材质本身的磁性。
第三种实施方式,在以上所述电磁真空吸盘1的第一、二种实施方式的基础上对活塞1-2的材料进行改进,即穿过所述电磁线圈3的中央通孔的所述活塞1-2的中上部或中下部为铁质材料,或者也可以是极性与电磁线圈1-3相对应的磁性橡胶。
在以上所述电磁真空吸盘的三种实施方式的基础上,所述柱形壳体1-1的开口为喇叭口,且所述橡胶吸盘1-6的大小与喇叭口相对应,以增加吸盘的吸附力。
其他所述电磁真空吸盘1的实施方式的工作方法与第一种所述电磁真空吸盘1的工作方法相同或相似。
所述吸盘控制电路包括:设于所述爬壁机器人的前端底部以检测所述电磁真空吸盘1即将接触所述幕墙的第一传感器、设于所述爬壁机器人的后端底部以检测所述电磁真空吸盘即将离开所述幕墙的第二传感器;以及与所述第一传感器、第二传感器相连的控制模块。
所述第一、第二传感器可采用红外线传感器;或者根据检测带动履带的滚轮的转动角度来得出所述电磁真空吸盘1 的当前状态。
实施例2
见图1-5,在实施例1的基础上所述爬壁机器人的爬行方法,包括:
①初始时,所述爬壁机器人的吸盘控制电路控制电磁真空吸盘1的电磁线圈1-3处于失电状态;
②当设于所述爬壁机器人的前端底部的第一传感器检测到所述履带2上的一电磁真空吸盘1接近幕墙面时,则所述吸盘控制电路控制该电磁真空吸盘1的电磁线圈1-3得电,即所述电磁线圈1-3吸引所述活塞1-2并带动橡胶吸盘1-6处于待吸附状态,即所述电磁真空吸盘1处于待吸附状态;当所述第一传感器检测到该电磁真空吸盘1完全贴于幕墙上后,所述吸盘控制电路控制该电磁真空吸盘1的电磁线圈1-3失电,即该电磁真空吸盘1中的弹性机构1-5使活塞1-2带动橡胶吸盘1-6吸附于幕墙上,即所述电磁真空吸盘1处于吸附状态;
③重复步骤②,使所述履带2的工作面整体吸附在幕墙上;
④当履带2滚动时,所述吸盘控制电路控制即将接触所述幕墙的电磁真空吸盘1得电,使相应的电磁真空吸盘1分别接触幕墙,然后再控制所述相应的电磁真空吸盘1失电;并当设于所述爬壁机器人的后端底部的第二传感器检测到所述履带2上的一电磁真空吸盘1即将离开幕墙面时,则所述吸盘控制电路控制该电磁真空吸盘1的电磁线圈1-3得电,使相应的电磁真空吸盘1快速离开幕墙,然后再由所述吸盘控制电路控制所述相应的电磁真空吸盘1失电。
显然,上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而这些属于本发明的精神所引伸出的显而易见的变化或变动仍处于本发明的保护范围之中。
价值度评估
技术价值
经济价值
法律价值
0 0 052.0分
0 50 75 100专利价值度是通过科学的评估模
型对专利价值进行量化的结果,
基于专利大数据针对专利总体特
征指标利用计算机自动化技术对
待评估专利进行高效、智能化的
分析,从技术、经济和法律价值
三个层面构建专利价值评估体
系,可以有效提升专利价值评估
的质量和效率。
总评:52.0分
该专利价值中等 (仅供参考)
本专利文献中包含【1 个技术分类】,从一定程度上而言上述指标的数值越大可以反映出所述专利的技术保护及应用范围越广。 【专利权的维持时间6 年】专利权的维持时间越长,其价值对于权利人而言越高。
技术价值 29.0
该指标主要从专利申请的著录信息、法律事件等内容中挖掘其技术价值,专利类型、独立权利要求数量、无效请求次数等内容均可反映出专利的技术性价值。 技术创新是专利申请的核心,若您需要进行技术借鉴或寻找可合作的项目,推荐您重点关注该指标。
部分指标包括:
授权周期(发明)
26 个月独立权利要求数量
0 个从属权利要求数量
0 个说明书页数
5 页实施例个数
0 个发明人数量
1 个被引用次数
0 次引用文献数量
0 个优先权个数
0 个技术分类数量
1 个无效请求次数
0 个分案子案个数
0 个同族专利数
0 个专利获奖情况
无保密专利的解密
否经济价值 7.0
该指标主要指示了专利技术在商品化、产业化及市场化过程中可能带来的预期利益。 专利技术只有转化成生产力才能体现其经济价值,专利技术的许可、转让、质押次数等指标均是其经济价值的表征。 因此,若您希望找到行业内的运用广泛的热点专利技术及侵权诉讼中的涉案专利,推荐您重点关注该指标。
部分指标包括:
申请人数量
1申请人类型
院校许可备案
0 次权利质押
0 次权利转移
0 个海关备案
否法律价值 16.0
该指标主要从专利权的稳定性角度评议其价值。专利权是一种垄断权,但其在法律保护的期间和范围内才有效。 专利权的存续时间、当前的法律状态可反映出其法律价值。故而,若您准备找寻权属稳定且专利权人非常重视的专利技术,推荐您关注该指标。
部分指标包括:
存活期/维持时间
6法律状态
无权-未缴年费







 苏公网安备 32041202001399号
苏公网安备 32041202001399号



 loading...
loading...